Sperm-shaped magnetic microrobots: Fabrication using electrospinning, modeling, and characterization
2016
Conference Paper
pi
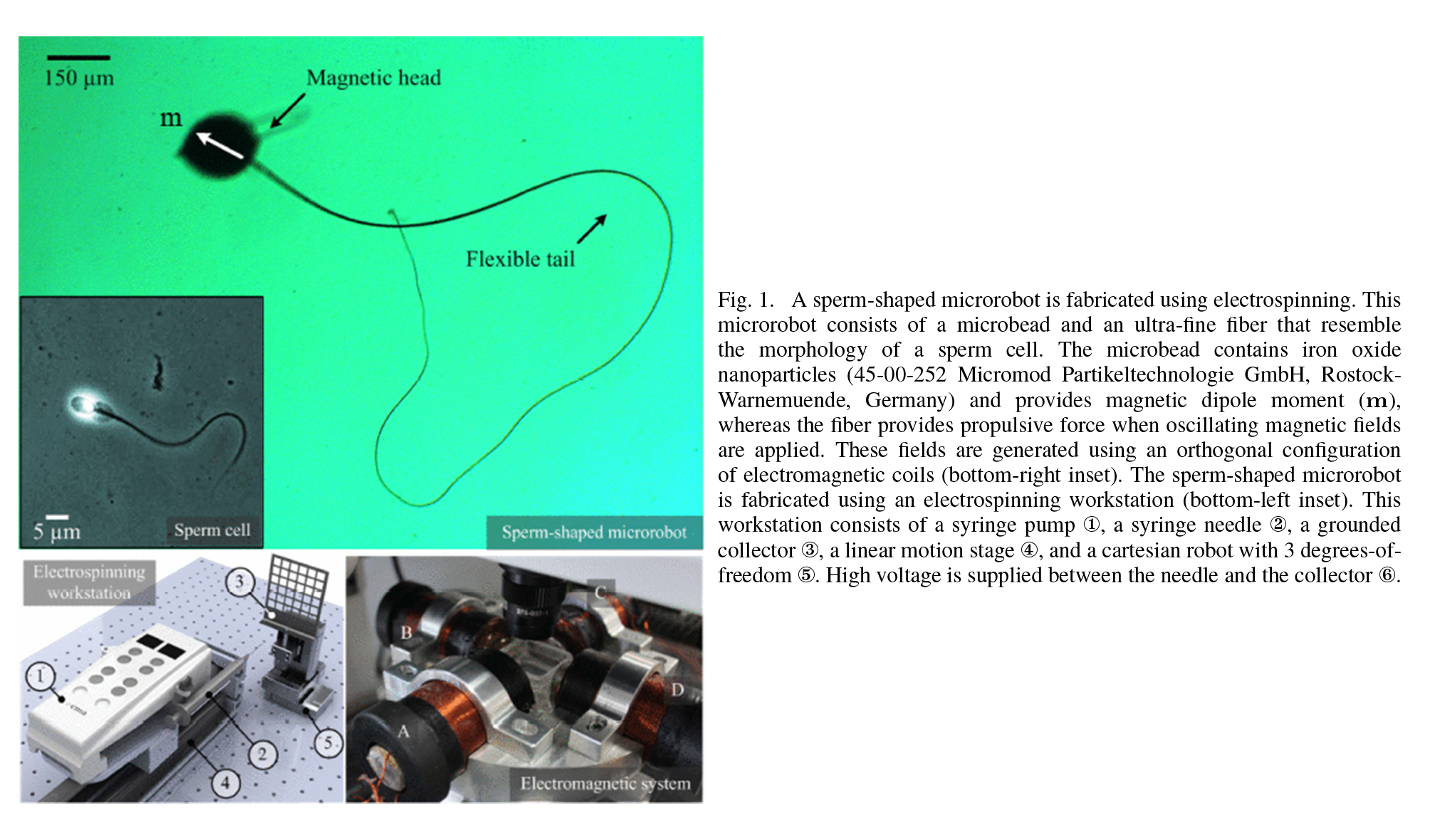
We use electrospinning to fabricate sperm-shaped magnetic microrobots with a range of diameters from 50 μm to 500 μm. The variables of the electrospinning operation (voltage, concentration of the solution, dynamic viscosity, and distance between the syringe needle and collector) to achieve beading effect are determined. This beading effect allows us to fabricate microrobots with similar morphology to that of sperm cells. The bead and the ultra-fine fiber resemble the morphology of the head and tail of the sperm cell, respectively. We incorporate iron oxide nanoparticles to the head of the sperm-shaped microrobot to provide a magnetic dipole moment. This dipole enables directional control under the influence of external magnetic fields. We also apply weak (less than 2 mT) oscillating magnetic fields to exert a magnetic torque on the magnetic head, and generate planar flagellar waves and flagellated swim. The average speed of the sperm-shaped microrobot is calculated to be 0.5 body lengths per second and 1 body lengths per second at frequencies of 5 Hz and 10 Hz, respectively. We also develop a model of the microrobot using elastohydrodynamics approach and Timoshenko-Rayleigh beam theory, and find good agreement with the experimental results.
| Author(s): | Khalil, Islam SM and Tabak, Ahmet Fatih and Hosney, Abdelrahman and Mohamed, Abdalla and Klingner, Anke and Ghoneima, Maged and Sitti, Metin |
| Book Title: | 2016 IEEE International Conference on Robotics and Automation (ICRA) |
| Pages: | 1939--1944 |
| Year: | 2016 |
| Month: | May |
| Department(s): | Physische Intelligenz |
| Bibtex Type: | Conference Paper (inproceedings) |
| Paper Type: | Conference |
| DOI: | 10.1109/ICRA.2016.7487340 |
|
BibTex @inproceedings{khalil2016sperm,
title = {Sperm-shaped magnetic microrobots: Fabrication using electrospinning, modeling, and characterization},
author = {Khalil, Islam SM and Tabak, Ahmet Fatih and Hosney, Abdelrahman and Mohamed, Abdalla and Klingner, Anke and Ghoneima, Maged and Sitti, Metin},
booktitle = {2016 IEEE International Conference on Robotics and Automation (ICRA)},
pages = {1939--1944},
month = may,
year = {2016},
doi = {10.1109/ICRA.2016.7487340},
month_numeric = {5}
}
|
|