Robust Dense Mapping for Large-Scale Dynamic Environments
2018
Conference Paper
avg
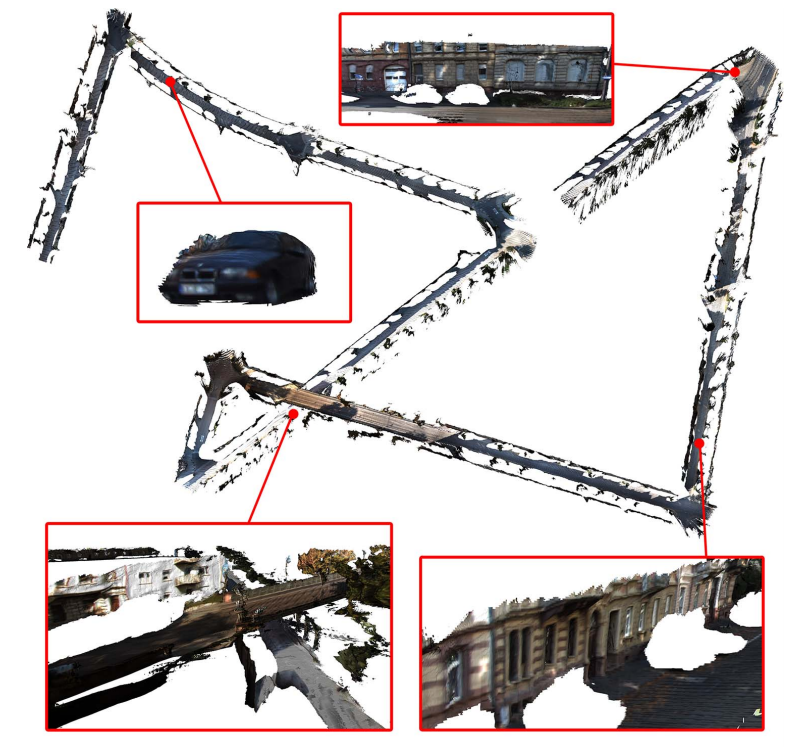
We present a stereo-based dense mapping algorithm for large-scale dynamic urban environments. In contrast to other existing methods, we simultaneously reconstruct the static background, the moving objects, and the potentially moving but currently stationary objects separately, which is desirable for high-level mobile robotic tasks such as path planning in crowded environments. We use both instance-aware semantic segmentation and sparse scene flow to classify objects as either background, moving, or potentially moving, thereby ensuring that the system is able to model objects with the potential to transition from static to dynamic, such as parked cars. Given camera poses estimated from visual odometry, both the background and the (potentially) moving objects are reconstructed separately by fusing the depth maps computed from the stereo input. In addition to visual odometry, sparse scene flow is also used to estimate the 3D motions of the detected moving objects, in order to reconstruct them accurately. A map pruning technique is further developed to improve reconstruction accuracy and reduce memory consumption, leading to increased scalability. We evaluate our system thoroughly on the well-known KITTI dataset. Our system is capable of running on a PC at approximately 2.5Hz, with the primary bottleneck being the instance-aware semantic segmentation, which is a limitation we hope to address in future work.
| Author(s): | Ioan Andrei Barsan and Peidong Liu and Marc Pollefeys and Andreas Geiger |
| Book Title: | Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) 2018 |
| Year: | 2018 |
| Month: | May |
| Publisher: | IEEE |
| Department(s): | Autonomous Vision |
| Research Project(s): |
Global Localization and Affordance Learning
|
| Bibtex Type: | Conference Paper (inproceedings) |
| Paper Type: | Conference |
| Event Name: | International Conference on Robotics and Automation |
| Event Place: | Brisbane, Australia |
| Links: |
pdf
Video Project Page |
| Video: | |
|
BibTex @inproceedings{Barsan2018ICRA,
title = {Robust Dense Mapping for Large-Scale Dynamic Environments },
author = {Barsan, Ioan Andrei and Liu, Peidong and Pollefeys, Marc and Geiger, Andreas},
booktitle = {Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) 2018},
publisher = {IEEE},
month = may,
year = {2018},
doi = {},
month_numeric = {5}
}
|
|