Comparing the effect of different spine and leg designs for a small bounding quadruped robot
2015
Conference Paper
dlg
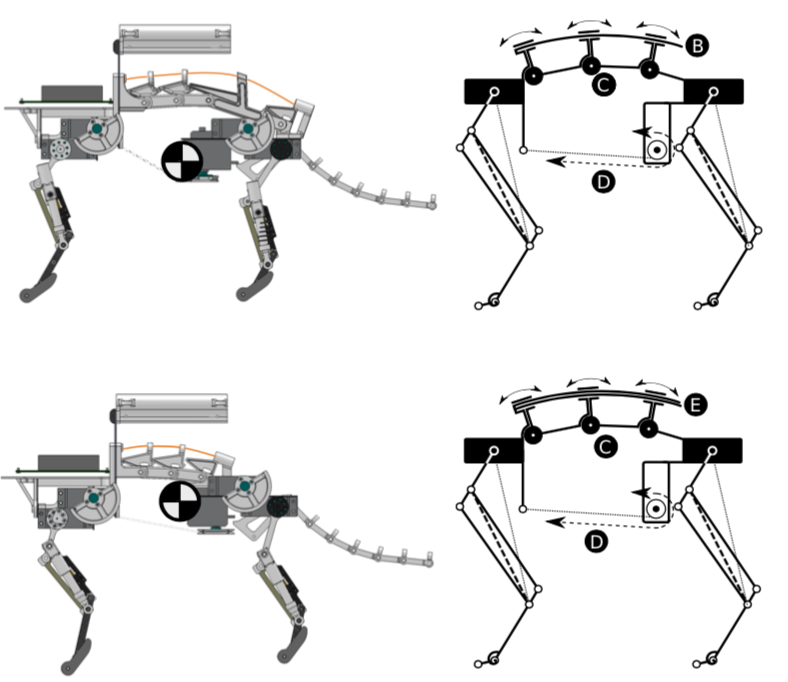
We present Lynx-robot, a quadruped, modular, compliant machine. It alternately features a directly actuated, single-joint spine design, or an actively supported, passive compliant, multi-joint spine configuration. Both spine con- figurations bend in the sagittal plane. This study aims at characterizing these two, largely different spine concepts, for a bounding gait of a robot with a three segmented, pantograph leg design. An earlier, similar-sized, bounding, quadruped robot named Bobcat with a two-segment leg design and a directly actuated, single-joint spine design serves as a comparison robot, to study and compare the effect of the leg design on speed, while keeping the spine design fixed. Both proposed spine designs (single rotatory and active and multi-joint compliant) reach moderate, self-stable speeds.
| Author(s): | Eckert, Peter and Spröwitz, Alexander and Witte, Hartmut and Ijspeert, Auke Jan |
| Book Title: | Proceedings of ICRA |
| Pages: | 3128--3133 |
| Year: | 2015 |
| Department(s): | Dynamic Locomotion |
| Research Project(s): |
Animal-inspired robot legs
|
| Bibtex Type: | Conference Paper (inproceedings) |
| DOI: | 10.1109/ICRA.2015.7139629 |
| Address: | Seattle, Washington, USA |
| State: | Published |
| URL: | http://ieeexplore.ieee.org/abstract/document/7139629/ |
|
BibTex @inproceedings{eckert_comparing_2015,
title = {Comparing the effect of different spine and leg designs for a small bounding quadruped robot},
author = {Eckert, Peter and Spr{\"o}witz, Alexander and Witte, Hartmut and {Ijspeert, Auke Jan}},
booktitle = {Proceedings of {ICRA}},
pages = {3128--3133},
address = {Seattle, Washington, USA},
year = {2015},
doi = {10.1109/ICRA.2015.7139629},
url = {http://ieeexplore.ieee.org/abstract/document/7139629/}
}
|
|