Development of a Minimalistic Pneumatic Quadruped Robot for Fast Locomotion
2012
Conference Paper
dlg
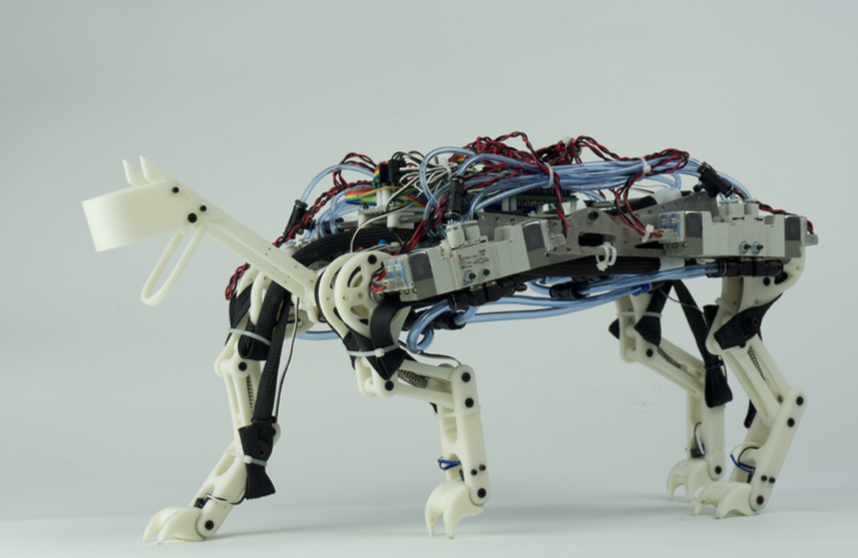
In this paper, we describe the development of the quadruped robot ”Ken” with the minimalistic and lightweight body design for achieving fast locomotion. We use McKibben pneumatic artificial muscles as actuators, providing high frequency and wide stride motion of limbs, also avoiding problems with overheating. We conducted a preliminary experiment, finding out that the robot can swing its limb over 7.5 Hz without amplitude reduction, nor heat problems. Moreover, the robot realized a several steps of bouncing gait by using simple CPG-based open loop controller, indicating that the robot can generate enough torque to kick the ground and limb contraction to avoid stumbling.
| Author(s): | Narioka, Kenichi and Rosendo, Andre and Spröwitz, Alexander and Hosoda, Koh |
| Book Title: | Proceedings of the 2012 IEEE International Conference on Robotics and Biomimetics (ROBIO), 2012 |
| Pages: | 307--311 |
| Year: | 2012 |
| Publisher: | IEEE |
| Department(s): | Dynamic Locomotion |
| Bibtex Type: | Conference Paper (inproceedings) |
| DOI: | 10.1109/ROBIO.2012.6490984 |
| Address: | Guangzhou |
|
BibTex @inproceedings{escidoc:2316381,
title = {Development of a Minimalistic Pneumatic Quadruped Robot for Fast Locomotion},
author = {Narioka, Kenichi and Rosendo, Andre and Spr{\"o}witz, Alexander and Hosoda, Koh},
booktitle = {Proceedings of the 2012 IEEE International Conference on Robotics and Biomimetics (ROBIO), 2012},
pages = {307--311},
publisher = {IEEE},
address = {Guangzhou},
year = {2012},
doi = {10.1109/ROBIO.2012.6490984}
}
|
|