Roombots-mechanical design of self-reconfiguring modular robots for adaptive furniture
2009
Conference Paper
dlg
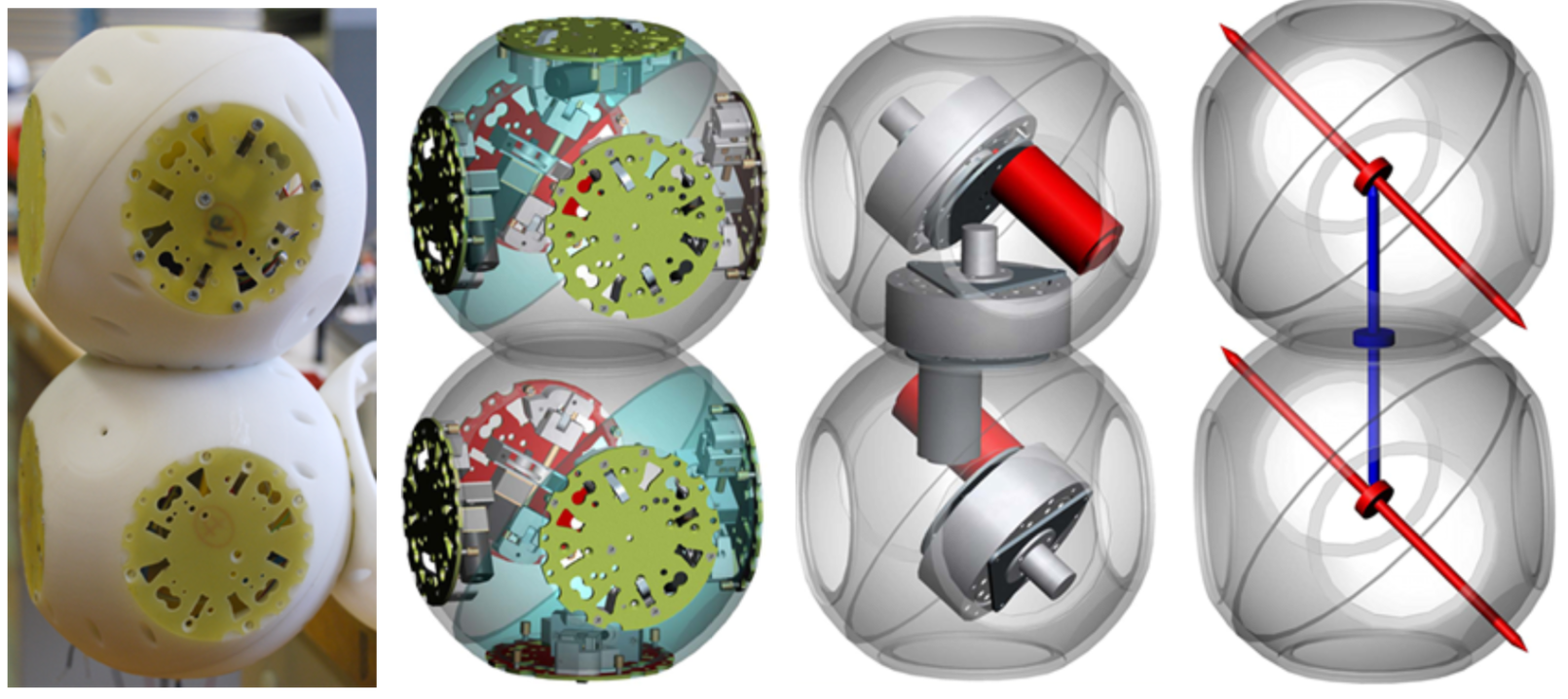
We aim at merging technologies from information technology, roomware, and robotics in order to design adaptive and intelligent furniture. This paper presents design principles for our modular robots, called Roombots, as future building blocks for furniture that moves and self-reconfigures. The reconfiguration is done using dynamic connection and disconnection of modules and rotations of the degrees of freedom. We are furthermore interested in applying Roombots towards adaptive behaviour, such as online learning of locomotion patterns. To create coordinated and efficient gait patterns, we use a Central Pattern Generator (CPG) approach, which can easily be optimized by any gradient-free optimization algorithm. To provide a hardware framework we present the mechanical design of the Roombots modules and an active connection mechanism based on physical latches. Further we discuss the application of our Roombots modules as pieces of a homogenic or heterogenic mix of building blocks for static structures.
| Author(s): | Spröwitz, Alexander and Billard, Aude and Dillenbourg, Pierre and Ijspeert, Auke Jan |
| Book Title: | Proceedings of the 2009 IEEE International Conference on Robotics and Automation (ICRA) |
| Pages: | 4259--4264 |
| Year: | 2009 |
| Publisher: | IEEE |
| Department(s): | Dynamic Locomotion |
| Bibtex Type: | Conference Paper (inproceedings) |
| DOI: | 10.1109/ROBOT.2009.5152613 |
| Address: | Kobe |
|
BibTex @inproceedings{escidoc:2316390,
title = {Roombots-mechanical design of self-reconfiguring modular robots for adaptive furniture},
author = {Spr{\"o}witz, Alexander and Billard, Aude and Dillenbourg, Pierre and Ijspeert, Auke Jan},
booktitle = {Proceedings of the 2009 IEEE International Conference on Robotics and Automation (ICRA)},
pages = {4259--4264},
publisher = {IEEE},
address = {Kobe},
year = {2009},
doi = {10.1109/ROBOT.2009.5152613}
}
|
|