2023
dlg
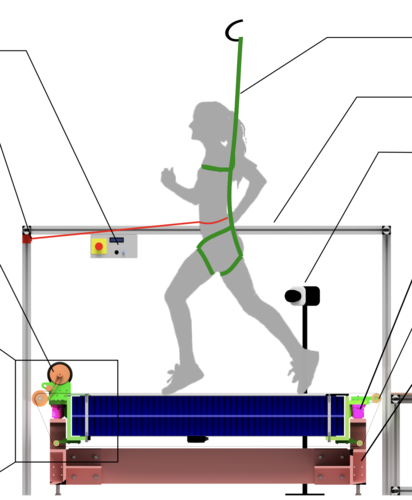
Sarvestani, A., Ruppert, F., Badri-Spröwitz, A.
An Open-Source Modular Treadmill for Dynamic Force Measurement with Load Dependant Range Adjustment
2023 (unpublished) Submitted
ei
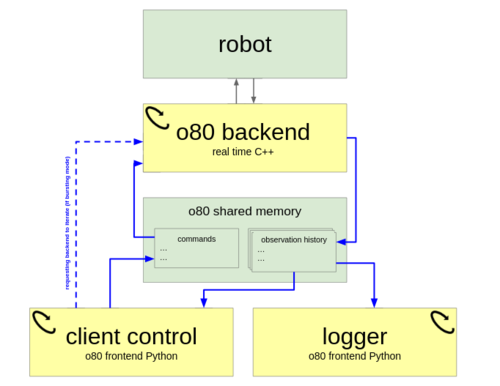
Berenz, V., Widmaier, F., Guist, S., Schölkopf, B., Büchler, D.
Synchronizing Machine Learning Algorithms, Realtime Robotic Control and Simulated Environment with o80
Robot Software Architectures Workshop (RSA) 2023, ICRA, 2023 (techreport)

ev
Elich, C., Kirchdorfer, L., Köhler, J. M., Schott, L.
Challenging Common Assumptions in Multi-task Learning
abs/2311.04698, CoRR/arxiv, 2023 (techreport)
2022
dlg
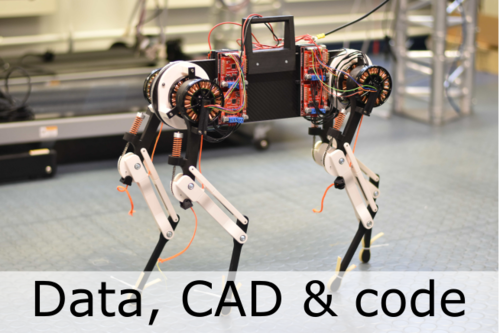
Ruppert, F., Badri-Spröwitz, A.
Learning Plastic Matching of Robot Dynamics in Closed-Loop Central Pattern Generators: Data
Edmond, May 2022 (techreport)
dlg
pi
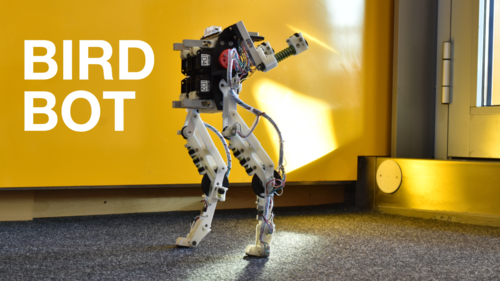
Badri-Spröwitz, A., Sarvestani, A. A., Sitti, M., Daley, M. A.
Data for BirdBot Achieves Energy-Efficient Gait with Minimal Control Using Avian-Inspired Leg Clutching
Edmond, March 2022 (techreport)
ev
Li, H., Stueckler, J.
Observability Analysis of Visual-Inertial Odometry with Online Calibration of Velocity-Control Based Kinematic Motion Models
abs/2204.06651, CoRR/arxiv, 2022 (techreport)
2021
re
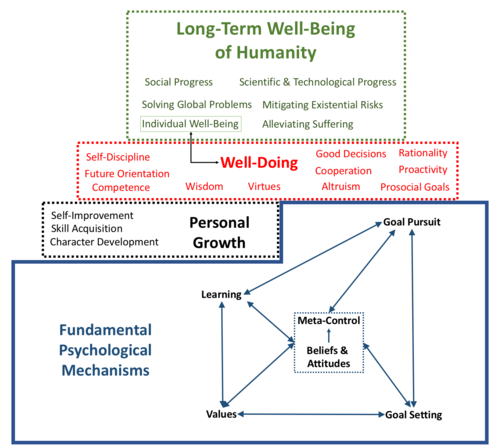
Lieder, F., Prentice, M., Corwin-Renner, E.
Toward a Science of Effective Well-Doing
May 2021 (techreport)
re
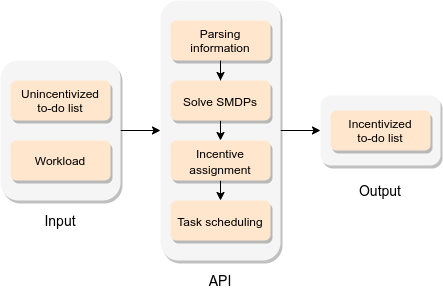
Consul, S., Stojcheski, J., Felso, V., Lieder, F.
Optimal To-Do List Gamification for Long Term Planning
arXiv preprint arXiv:2109.06505, 2021 (techreport)
pi
Sitti, M., Liimatainen, V.
Method of making one or more fibrils, computer implemented method of simulating an adhesive force of one or more fibrils and fibril
2021, EP Prio. Patent App. 21 162 253.5 (mpi_year_book)
2020
re
Stojcheski, J., Felso, V., Lieder, F.
Optimal To-Do List Gamification
ArXiv Preprint, 2020 (techreport)
ics
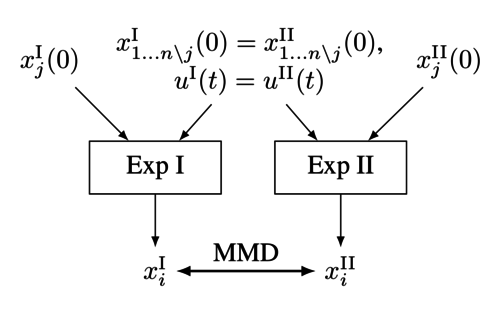
Baumann, D., Solowjow, F., Johansson, K. H., Trimpe, S.
Identifying Causal Structure in Dynamical Systems
2020 (techreport)

lds
Muehlebach, M.
The Silver Ratio and its Relation to Controllability
2019 (techreport)
2018
ev
Ma, L., Stueckler, J., Wu, T., Cremers, D.
Detailed Dense Inference with Convolutional Neural Networks via Discrete Wavelet Transform
arxiv, 2018, arXiv:1808.01834 (techreport)
lds
Muehlebach, M., D’Andrea, R.
On the Approximation of Constrained Linear Quadratic Regulator Problems and their Application to Model Predictive Control
2018 (techreport)
slt
Keriven, N., Garreau, D., Poli, I.
NEWMA: a new method for scalable model-free online change-point detection
2018 (techreport)
pf
Wu, Z., Troll, J., Jeong, H., Qiang, W., Stang, M., Ziemssen, F., Wang, Z., Dong, M., Schnichels, S., Qiu, T., Fischer, P.
Nanorobots propel through the eye
Max Planck Society, 2018 (mpi_year_book)
2016
am
ics
Ebner, S., Trimpe, S.
Supplemental material for ’Communication Rate Analysis for Event-based State Estimation’
Max Planck Institute for Intelligent Systems, January 2016 (techreport)
2015
am
ics
Trimpe, S.
Distributed Event-based State Estimation
Max Planck Institute for Intelligent Systems, November 2015 (techreport)
ei
Abbott, T., Abdalla, F. B., Allam, S., Amara, A., Annis, J., Armstrong, R., Bacon, D., Banerji, M., Bauer, A. H., Baxter, E., others,
Cosmology from Cosmic Shear with DES Science Verification Data
arXiv preprint arXiv:1507.05552, 2015 (techreport)
ei
Jarvis, M., Sheldon, E., Zuntz, J., Kacprzak, T., Bridle, S. L., Amara, A., Armstrong, R., Becker, M. R., Bernstein, G. M., Bonnett, C., others,
The DES Science Verification Weak Lensing Shear Catalogs
arXiv preprint arXiv:1507.05603, 2015 (techreport)
2014
ps
Freifeld, O., Hauberg, S., Black, M. J.
Model transport: towards scalable transfer learning on manifolds - supplemental material
(9), April 2014 (techreport)
ps
Ahmad, A., Amigoni, A., Awaad, I., Berghofer, J., Bischoff, R., Bonarini, A., Dwiputra, R., Fontana, G., Hegger, F., Hochgeschwender, N., Iocchi, L., Kraetzschmar, G., Lima, P., Matteucci, M., Nardi, D., Schiaffonati, V., Schneider, S.
RoCKIn@Work in a Nutshell
(FP7-ICT-601012 Revision 1.2), RoCKIn - Robot Competitions Kick Innovation in Cognitive Systems and Robotics, March 2014 (techreport)
ps
Ahmad, A., Amigoni, F., Awaad, I., Berghofer, J., Bischoff, R., Bonarini, A., Dwiputra, R., Fontana, G., Hegger, F., Hochgeschwender, N., Iocchi, L., Kraetzschmar, G., Lima, P., Matteucci, M., Nardi, D., Schneider, S.
RoCKIn@Home in a Nutshell
(FP7-ICT-601012 Revision 0.8), RoCKIn - Robot Competitions Kick Innovation in Cognitive Systems and Robotics, March 2014 (techreport)

ps
Tang, S., Andriluka, M., Milan, A., Schindler, K., Roth, S., Schiele, B.
Learning People Detectors for Tracking in Crowded Scenes.
2014, Scene Understanding Workshop (SUNw, CVPR workshop) (unpublished)
2013
ps
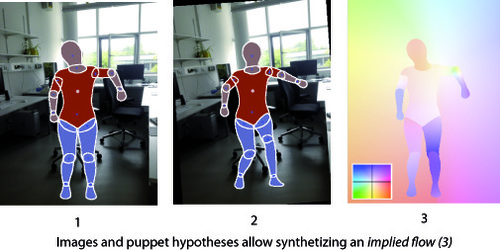
Zuffi, S., Black, M. J.
Puppet Flow
(7), Max Planck Institute for Intelligent Systems, October 2013 (techreport)
ps
Ahmad, A., Awaad, I., Amigoni, F., Berghofer, J., Bischoff, R., Bonarini, A., Dwiputra, R., Hegger, F., Hochgeschwender, N., Iocchi, L., Kraetzschmar, G., Lima, P., Matteucci, M., Nardi, D., Schneider, S.
D2.1.4 RoCKIn@Work - Innovation in Mobile Industrial Manipulation Competition Design, Rule Book, and Scenario Construction
(FP7-ICT-601012 Revision 0.7), RoCKIn - Robot Competitions Kick Innovation in Cognitive Systems and Robotics, sep 2013 (techreport)
ps
Ahmad, A., Awaad, I., Amigoni, F., Berghofer, J., Bischoff, R., Bonarini, A., Dwiputra, R., Hegger, F., Hochgeschwender, N., Iocchi, L., Kraetzschmar, G., Lima, P., Matteucci, M., Nardi, D., Schneider, S.
D2.1.1 RoCKIn@Home - A Competition for Domestic Service Robots
Competition Design, Rule Book, and Scenario Construction
(FP7-ICT-601012 Revision 0.7), RoCKIn - Robot Competitions Kick Innovation in Cognitive Systems and Robotics, sep 2013 (techreport)
ps
Ahmad, A., Awaad, I., Amigoni, F., Berghofer, J., Bischoff, R., Bonarini, A., Dwiputra, R., Fontana, G., Hegger, F., Hochgeschwender, N., Iocchi, L., Kraetzschmar, G., Lima, P., Matteucci, M., Nardi, D., Schiaffonati, V., Schneider, S.
D1.1 Specification of General Features of Scenarios and Robots for Benchmarking Through Competitions
(FP7-ICT-601012 Revision 1.0), RoCKIn - Robot Competitions Kick Innovation in Cognitive Systems and Robotics, July 2013 (techreport)
ps
Messias, J., Ahmad, A., Reis, J., Serafim, M., Lima, P.
SocRob-MSL 2013 Team Description Paper for Middle Sized League
17th Annual RoboCup International Symposium 2013, July 2013 (techreport)
am
Sankaran, B., Ghazvininejad, M., He, X., Kale, D., Cohen, L.
Learning and Optimization with Submodular Functions
ArXiv, May 2013 (techreport)

ps
Sun, D., Roth, S., Black, M. J.
A Quantitative Analysis of Current Practices in Optical Flow Estimation and the Principles Behind Them
(CS-10-03), Brown University, Department of Computer Science, January 2013 (techreport)
ei
pn
Hennig, P.
Animating Samples from Gaussian Distributions
(8), Max Planck Institute for Intelligent Systems, Tübingen, Germany, 2013 (techreport)
ei
Hogg, D. W., Angus, R., Barclay, T., Dawson, R., Fergus, R., Foreman-Mackey, D., Harmeling, S., Hirsch, M., Lang, D., Montet, B. T., Schiminovich, D., Schölkopf, B.
Maximizing Kepler science return per telemetered pixel: Detailed models of the focal plane in the two-wheel era
arXiv:1309.0653, 2013 (techreport)
ei
Montet, B. T., Angus, R., Barclay, T., Dawson, R., Fergus, R., Foreman-Mackey, D., Harmeling, S., Hirsch, M., Hogg, D. W., Lang, D., Schiminovich, D., Schölkopf, B.
Maximizing Kepler science return per telemetered pixel: Searching the habitable zones of the brightest stars
arXiv:1309.0654, 2013 (techreport)

2012
ps
Hirshberg, D., Loper, M., Rachlin, E., Black, M. J.
Coregistration: Supplemental Material
(No. 4), Max Planck Institute for Intelligent Systems, October 2012 (techreport)

ps
Freifeld, O., Black, M. J.
Lie Bodies: A Manifold Representation of 3D Human Shape. Supplemental Material
(No. 5), Max Planck Institute for Intelligent Systems, October 2012 (techreport)

ps
Butler, D. J., Wulff, J., Stanley, G. B., Black, M. J.
MPI-Sintel Optical Flow Benchmark: Supplemental Material
(No. 6), Max Planck Institute for Intelligent Systems, October 2012 (techreport)
ei
Grosse-Wentrup, M., Schölkopf, B.
High Gamma-Power Predicts Performance in Brain-Computer Interfacing
(3), Max-Planck-Institut für Intelligente Systeme, Tübingen, February 2012 (techreport)

ps
Soren Hauberg, Kim S. Pedersen
HUMIM Software for Articulated Tracking
(01/2012), Department of Computer Science, University of Copenhagen, January 2012 (techreport)
ps
Aasa Feragen, Mads Nielsen, Soren Hauberg, Pechin Lo, Marleen de Bruijne, Francois Lauze
A geometric framework for statistics on trees
(11/02), Department of Computer Science, University of Copenhagen, January 2012 (techreport)
2011
ps
Messias, J., Ahmad, A., Reis, J., Sousa, J., Lima, P.
ISocRob-MSL 2011 Team Description Paper for Middle Sized League
15th Annual RoboCup International Symposium 2011, July 2011 (techreport)
ei
Seldin, Y., Laviolette, F., Shawe-Taylor, J., Peters, J., Auer, P.
PAC-Bayesian Analysis of Martingales and Multiarmed Bandits
Max Planck Institute for Biological Cybernetics, Tübingen, Germany, May 2011 (techreport)
ei
Schuler, C., Hirsch, M., Harmeling, S., Schölkopf, B.
Non-stationary Correction of Optical Aberrations
(1), Max Planck Institute for Intelligent Systems, Tübingen, Germany, May 2011 (techreport)
ei
Nickisch, H., Seeger, M.
Multiple Kernel Learning: A Unifying Probabilistic Viewpoint
Max Planck Institute for Biological Cybernetics, March 2011 (techreport)
ei
Langovoy, M., Wittich, O.
Multiple testing, uncertainty and realistic pictures
(2011-004), EURANDOM, Technische Universiteit Eindhoven, January 2011 (techreport)
ei
Sra, S.
Nonconvex proximal splitting: batch and incremental algorithms
(2), Max Planck Institute for Intelligent Systems, Tübingen, Germany, 2011 (techreport)
ps
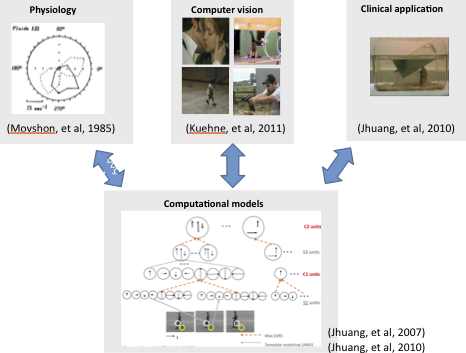
Jhuang, H.
Dorsal Stream: From Algorithm to Neuroscience
PhD Thesis, MIT, 2011 (techreport)
2010
ei
Langovoy, M., Wittich, O.
Computationally efficient algorithms for statistical image processing: Implementation in R
(2010-053), EURANDOM, Technische Universiteit Eindhoven, December 2010 (techreport)
ei
Seeger, M., Nickisch, H.
Fast Convergent Algorithms for Expectation Propagation Approximate Bayesian Inference
Max Planck Institute for Biological Cybernetics, December 2010 (techreport)