2023
ei
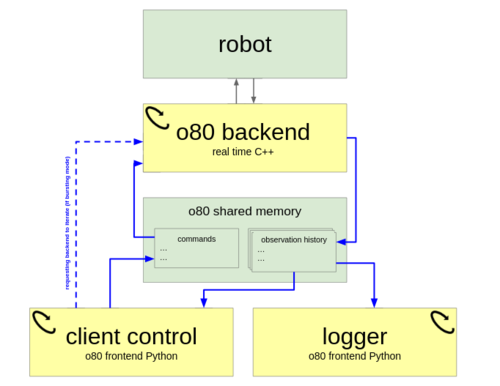
Berenz, V., Widmaier, F., Guist, S., Schölkopf, B., Büchler, D.
Synchronizing Machine Learning Algorithms, Realtime Robotic Control and Simulated Environment with o80
Robot Software Architectures Workshop (RSA) 2023, ICRA, 2023 (techreport)

ev
Elich, C., Kirchdorfer, L., Köhler, J. M., Schott, L.
Challenging Common Assumptions in Multi-task Learning
abs/2311.04698, CoRR/arxiv, 2023 (techreport)
2022
ps
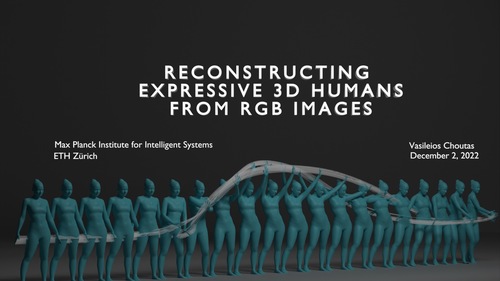
Choutas, V.
Reconstructing Expressive 3D Humans from RGB Images
ETH Zurich, Max Planck Institute for Intelligent Systems and ETH Zurich, December 2022 (thesis)
ei
Schölkopf, B.
Causality, causal digital twins, and their applications
Machine Learning for Science: Bridging Data-Driven and Mechanistic Modelling (Dagstuhl Seminar 22382), (Editors: Berens, Philipp and Cranmer, Kyle and Lawrence, Neil D. and von Luxburg, Ulrike and Montgomery, Jessica), September 2022 (talk)
dlg
Ruppert, F., Badri-Spröwitz, A.
Learning Plastic Matching of Robot Dynamics in Closed-Loop Central Pattern Generators: Data
Edmond, May 2022 (techreport)
dlg
pi
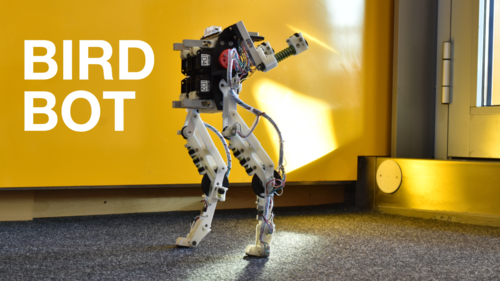
Badri-Spröwitz, A., Sarvestani, A. A., Sitti, M., Daley, M. A.
Data for BirdBot Achieves Energy-Efficient Gait with Minimal Control Using Avian-Inspired Leg Clutching
Edmond, March 2022 (techreport)
ev
Li, H., Stueckler, J.
Observability Analysis of Visual-Inertial Odometry with Online Calibration of Velocity-Control Based Kinematic Motion Models
abs/2204.06651, CoRR/arxiv, 2022 (techreport)
2021
ev
Strecke, M., Stückler, J.
Physically Plausible Tracking & Reconstruction of Dynamic Objects
KIT Science Week Scientific Conference & DGR-Days 2021, October 2021 (talk)
re
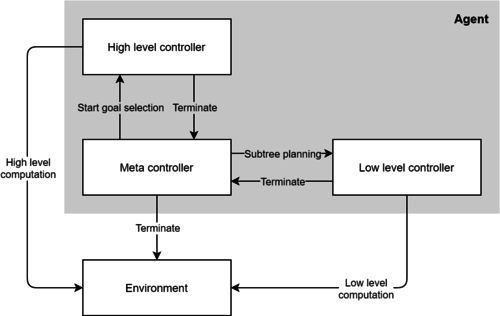
Heindrich, L., Consul, S., Stojcheski, J., Lieder, F.
Improving Human Decision-Making by Discovering Efficient Strategies for Hierarchical Planning
Tübingen, Germany, The first edition of Life Improvement Science Conference, June 2021 (talk) Accepted
re
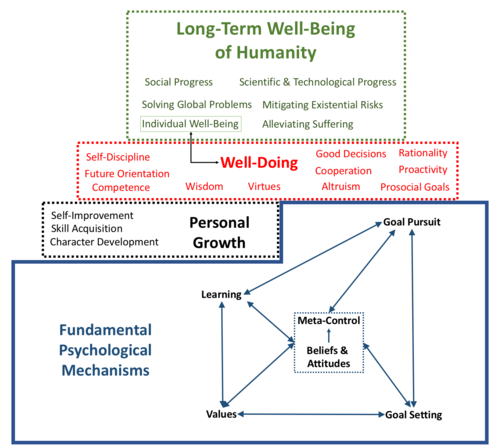
Lieder, F., Prentice, M., Corwin-Renner, E.
Toward a Science of Effective Well-Doing
May 2021 (techreport)
2020
mms
Nacke, R.
Voltage dependent interfacial magnetism in multilayer systems
Universität Stuttgart, Stuttgart, December 2020 (thesis)
re
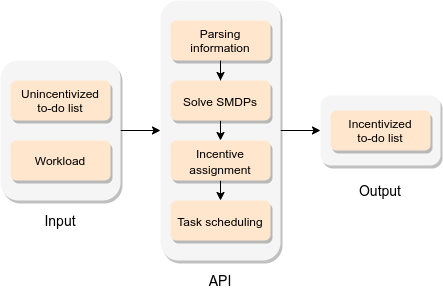
Stojcheski, J., Felso, V., Lieder, F.
Optimal To-Do List Gamification
ArXiv Preprint, 2020 (techreport)
dlg
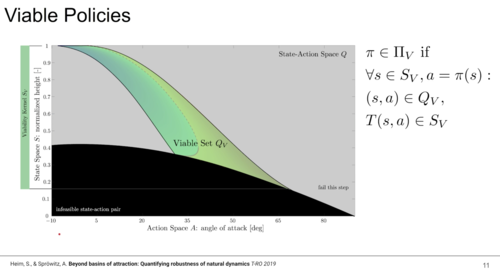
Heim, S., Badri-Spröwitz, A.
Beyond Basins of Attraction: Quantifying Robustness of Natural Dynamics
May 2020 (talk)
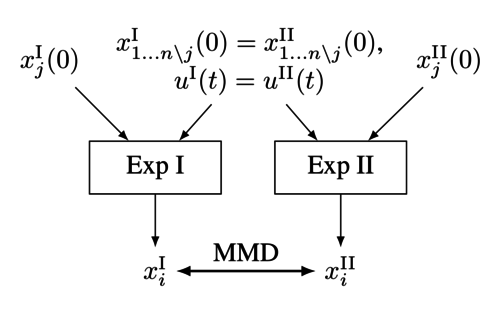
ics
Baumann, D., Solowjow, F., Johansson, K. H., Trimpe, S.
Identifying Causal Structure in Dynamical Systems
2020 (techreport)
2019
ei
Safavi, S., Logothetis, N., Besserve, M.
Multivariate coupling estimation between continuous signals and point processes
Neural Information Processing Systems 2019 - Workshop on Learning with Temporal Point Processes, December 2019 (talk)
2018
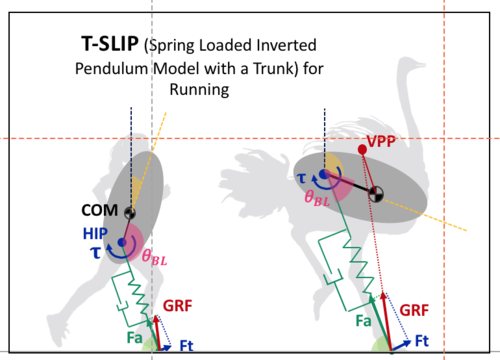
dlg
Drama, Ö.
Impact of Trunk Orientation for Dynamic Bipedal Locomotion
Dynamic Walking Conference, May 2018 (talk)
ev
Ma, L., Stueckler, J., Wu, T., Cremers, D.
Detailed Dense Inference with Convolutional Neural Networks via Discrete Wavelet Transform
arxiv, 2018, arXiv:1808.01834 (techreport)
slt
Keriven, N., Garreau, D., Poli, I.
NEWMA: a new method for scalable model-free online change-point detection
2018 (techreport)
2016
am
ics
Ebner, S., Trimpe, S.
Supplemental material for ’Communication Rate Analysis for Event-based State Estimation’
Max Planck Institute for Intelligent Systems, January 2016 (techreport)
2015
am
ics
Trimpe, S.
Distributed Event-based State Estimation
Max Planck Institute for Intelligent Systems, November 2015 (techreport)
ei
Besserve, M.
Causal Inference for Empirical Time Series Based on the Postulate of Independence of Cause and Mechanism
53rd Annual Allerton Conference on Communication, Control, and Computing, September 2015 (talk)
ei
Besserve, M.
Independence of cause and mechanism in brain networks
DALI workshop on Networks: Processes and Causality, April 2015 (talk)
am
ics
Doerr, A.
Policy Search for Imitation Learning
University of Stuttgart, January 2015 (thesis)
ei
Chaves, R., Majenz, C., Luft, L., Maciel, T., Janzing, D., Schölkopf, B., Gross, D.
Information-Theoretic Implications of Classical and Quantum Causal Structures
18th Conference on Quantum Information Processing (QIP), 2015 (talk)
ei
Abbott, T., Abdalla, F. B., Allam, S., Amara, A., Annis, J., Armstrong, R., Bacon, D., Banerji, M., Bauer, A. H., Baxter, E., others,
Cosmology from Cosmic Shear with DES Science Verification Data
arXiv preprint arXiv:1507.05552, 2015 (techreport)
ei
Jarvis, M., Sheldon, E., Zuntz, J., Kacprzak, T., Bridle, S. L., Amara, A., Armstrong, R., Becker, M. R., Bernstein, G. M., Bonnett, C., others,
The DES Science Verification Weak Lensing Shear Catalogs
arXiv preprint arXiv:1507.05603, 2015 (techreport)
ei
Foreman-Mackey, D., Hogg, D. W., Schölkopf, B.
The search for single exoplanet transits in the Kepler light curves
IAU General Assembly, 22, pages: 2258352, 2015 (talk)
2014
ps
Freifeld, O., Hauberg, S., Black, M. J.
Model transport: towards scalable transfer learning on manifolds - supplemental material
(9), April 2014 (techreport)
ei
Besserve, M., Schölkopf, B., Logothetis, N. K.
Unsupervised identification of neural events in local field potentials
44th Annual Meeting of the Society for Neuroscience (Neuroscience), 2014 (talk)
ei
Besserve, M.
Quantifying statistical dependency
Research Network on Learning Systems Summer School, 2014 (talk)
ei
Schmeißer, N.
Development of advanced methods for improving astronomical images
Eberhard Karls Universität Tübingen, Germany, Eberhard Karls Universität Tübingen, Germany, 2014 (diplomathesis)
ei
Janzing, D.
Causal Inference from Passive Observations
24th Summer School University of Jyväskylā, Finland, August, 2014 (talk)
2013
ei
pn
Schober, M.
Camera-specific Image Denoising
Eberhard Karls Universität Tübingen, Germany, October 2013 (diplomathesis)
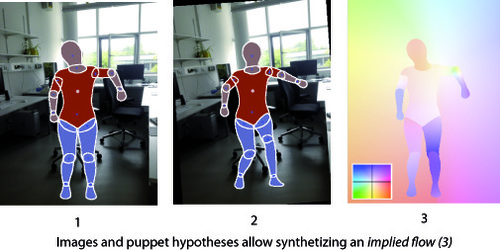
ps
Zuffi, S., Black, M. J.
Puppet Flow
(7), Max Planck Institute for Intelligent Systems, October 2013 (techreport)
ei
Logothetis, N., Eschenko, O., Murayama, Y., Augath, M., Steudel, T., Evrard, H., Besserve, M., Oeltermann, A.
Studying large-scale brain networks: electrical stimulation and neural-event-triggered fMRI
Twenty-Second Annual Computational Neuroscience Meeting (CNS*2013), July 2013, journal = {BMC Neuroscience},
year = {2013},
month = {7},
volume = {14},
number = {Supplement 1},
pages = {A1}, (talk)
am
Sankaran, B., Ghazvininejad, M., He, X., Kale, D., Cohen, L.
Learning and Optimization with Submodular Functions
ArXiv, May 2013 (techreport)

ps
Sun, D., Roth, S., Black, M. J.
A Quantitative Analysis of Current Practices in Optical Flow Estimation and the Principles Behind Them
(CS-10-03), Brown University, Department of Computer Science, January 2013 (techreport)
ei
Mantlik, F., Bezrukov, I., Hofmann, M., Schölkopf, B., Pichler, B.
MR-Based Attenuation Correction for Combined Brain PET/MR: Robustness of Atlas- and Pattern Recognition Method to Atlas Registration Failures
IEEE Nuclear Science Symposium and Medical Imaging Conference (IEEE MIC), 2013 (talk)
ei
pn
Hennig, P.
Animating Samples from Gaussian Distributions
(8), Max Planck Institute for Intelligent Systems, Tübingen, Germany, 2013 (techreport)
ei
Muandet, K.
Domain Generalization via Invariant Feature Representation
30th International Conference on Machine Learning (ICML2013), 2013 (talk)
ei
Hogg, D. W., Angus, R., Barclay, T., Dawson, R., Fergus, R., Foreman-Mackey, D., Harmeling, S., Hirsch, M., Lang, D., Montet, B. T., Schiminovich, D., Schölkopf, B.
Maximizing Kepler science return per telemetered pixel: Detailed models of the focal plane in the two-wheel era
arXiv:1309.0653, 2013 (techreport)
ei
Montet, B. T., Angus, R., Barclay, T., Dawson, R., Fergus, R., Foreman-Mackey, D., Harmeling, S., Hirsch, M., Hogg, D. W., Lang, D., Schiminovich, D., Schölkopf, B.
Maximizing Kepler science return per telemetered pixel: Searching the habitable zones of the brightest stars
arXiv:1309.0654, 2013 (techreport)
2012
ei
Muandet, K.
Support Vector Machines, Support Measure Machines, and Quasar Target Selection
Center for Cosmology and Particle Physics (CCPP), New York University, December 2012 (talk)
ei
Muandet, K.
Hilbert Space Embedding for Dirichlet Process Mixtures
NIPS Workshop on Confluence between Kernel Methods and Graphical Models, December 2012 (talk)

ps
Hirshberg, D., Loper, M., Rachlin, E., Black, M. J.
Coregistration: Supplemental Material
(No. 4), Max Planck Institute for Intelligent Systems, October 2012 (techreport)

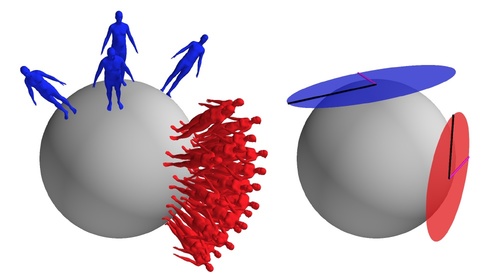
ps
Freifeld, O., Black, M. J.
Lie Bodies: A Manifold Representation of 3D Human Shape. Supplemental Material
(No. 5), Max Planck Institute for Intelligent Systems, October 2012 (techreport)

ps
Butler, D. J., Wulff, J., Stanley, G. B., Black, M. J.
MPI-Sintel Optical Flow Benchmark: Supplemental Material
(No. 6), Max Planck Institute for Intelligent Systems, October 2012 (techreport)
ei
Wehrl, H., Lankes, K., Hossain, M., Bezrukov, I., Liu, C., Martirosian, P., Schick, F., Pichler, B.
Simultaneous small animal PET/MR in activated and resting state reveals multiple brain networks
20th Annual Meeting and Exhibition of the International Society for Magnetic Resonance in Medicine (ISMRM), May 2012 (talk)