Fiberbot: A miniature crawling robot using a directional fibrillar pad
2015
Conference Paper
pi
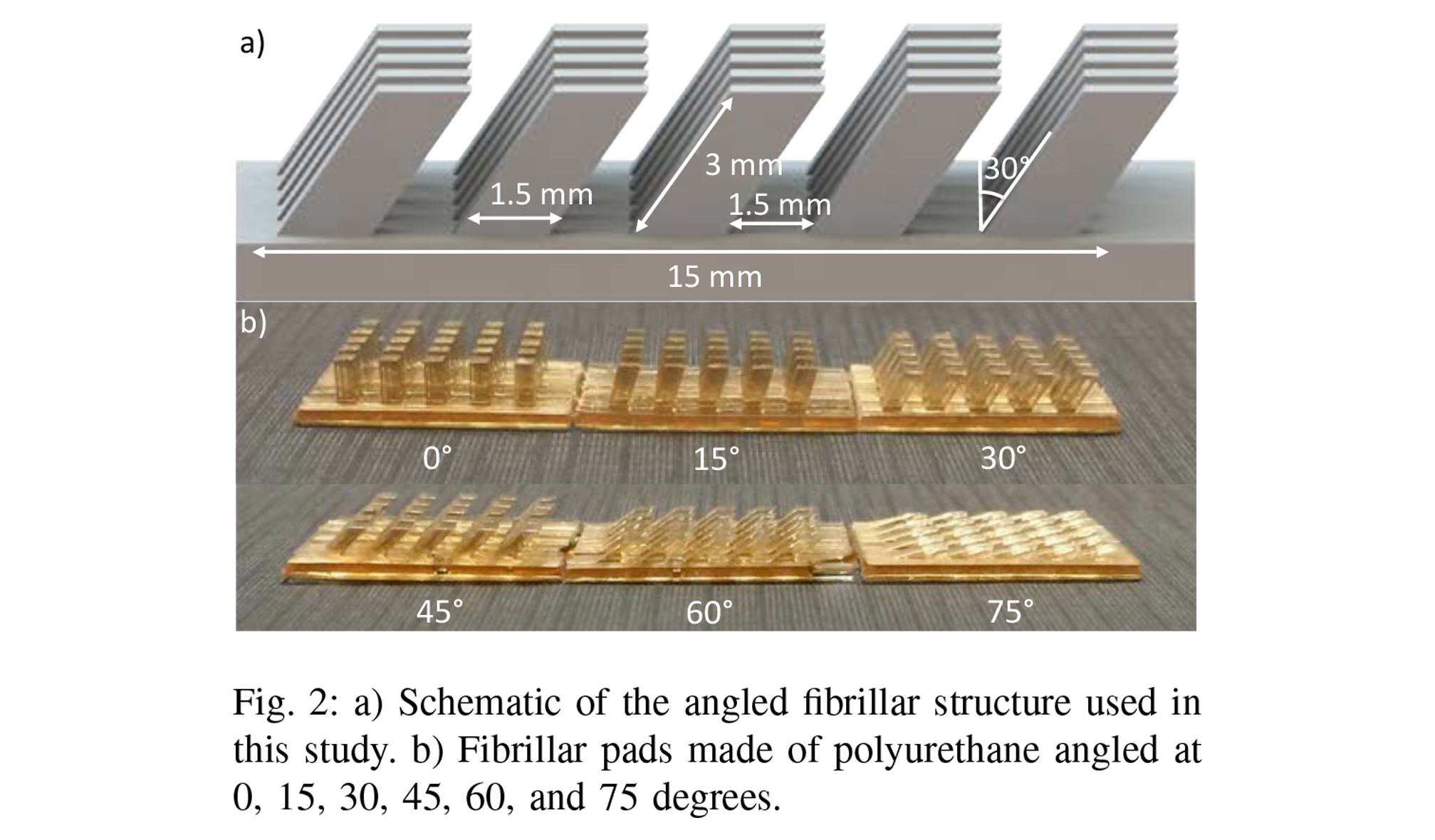
Vibration-driven locomotion has been widely used for crawling robot studies. Such robots usually have a vibration motor as the actuator and a fibrillar structure for providing directional friction on the substrate. However, there has not been any studies about the effect of fiber structure on robot crawling performance. In this paper, we develop Fiberbot, a custom made mini vibration robot, for studying the effect of fiber angle on robot velocity, steering, and climbing performance. It is known that the friction force with and against fibers depends on the fiber angle. Thus, we first present a new fabrication method for making millimeter scale fibers at a wide range of angles. We then show that using 30° angle fibers that have the highest friction anisotropy (ratio of backward to forward friction force) among the other fibers we fabricated in this study, Fiberbot speed on glass increases to 13.8±0.4 cm/s (compared to ν = 0.6±0.1 cm/s using vertical fibers). We also demonstrate that the locomotion direction of Fiberbot depends on the tilting direction of fibers and we can steer the robot by rotating the fiber pad. Fiberbot could also climb on glass at inclinations of up to 10° when equipped with fibers of high friction anisotropy. We show that adding a rigid tail to the robot it can climb on glass at 25° inclines. Moreover, the robot is able to crawl on rough surfaces such as wood (ν = 10.0±0.2 cm/s using 30° fiber pad). Fiberbot, a low-cost vibration robot equipped with a custom-designed fiber pad with steering and climbing capabilities could be used for studies on collective behavior on a wide range of topographies as well as search and exploratory missions.
| Author(s): | Han, Yuanfeng and Marvi, Hamidreza and Sitti, Metin |
| Book Title: | Robotics and Automation (ICRA), 2015 IEEE International Conference on |
| Pages: | 3122--3127 |
| Year: | 2015 |
| Month: | May |
| Day: | 26 |
| Department(s): | Physical Intelligence |
| Bibtex Type: | Conference Paper (inproceedings) |
| DOI: | 10.1109/ICRA.2015.7139628 |
| ISBN: | 978-1-4799-6923-4 |
| Organization: | IEEE |
|
BibTex @inproceedings{han2015fiberbot,
title = {Fiberbot: A miniature crawling robot using a directional fibrillar pad},
author = {Han, Yuanfeng and Marvi, Hamidreza and Sitti, Metin},
booktitle = {Robotics and Automation (ICRA), 2015 IEEE International Conference on},
pages = {3122--3127},
organization = {IEEE},
month = may,
year = {2015},
doi = {10.1109/ICRA.2015.7139628},
month_numeric = {5}
}
|
|