2022
ps
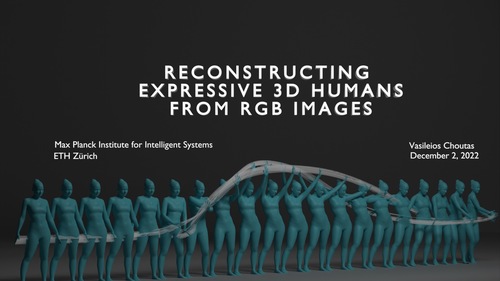
Choutas, V.
Reconstructing Expressive 3D Humans from RGB Images
ETH Zurich, Max Planck Institute for Intelligent Systems and ETH Zurich, December 2022 (thesis)

2021
ei
Belousov, B., H., A., Klink, P., Parisi, S., Peters, J.
Reinforcement Learning Algorithms: Analysis and Applications
883, Studies in Computational Intelligence, Springer International Publishing, 2021 (book)
2020
mms
Nacke, R.
Voltage dependent interfacial magnetism in multilayer systems
Universität Stuttgart, Stuttgart, December 2020 (thesis)

avg
Janai, J., Güney, F., Behl, A., Geiger, A.
Computer Vision for Autonomous Vehicles: Problems, Datasets and State-of-the-Art
Arxiv, Foundations and Trends in Computer Graphics and Vision, 2020 (book)
2019
mms
Keskinbora, K.
Prototyping Micro- and Nano-Optics with Focused Ion Beam Lithography
SL48, pages: 46, SPIE.Spotlight, SPIE Press, Bellingham, WA, 2019 (book)
2017
ei
Peters, J., Janzing, D., Schölkopf, B.
Elements of Causal Inference - Foundations and Learning Algorithms
Adaptive Computation and Machine Learning Series, The MIT Press, Cambridge, MA, USA, 2017 (book)
pi
Sitti, M.
Mobile Microrobotics
Mobile Microrobotics, The MIT Press, Cambridge, MA, 2017 (book)
2015
am
ics
Doerr, A.
Policy Search for Imitation Learning
University of Stuttgart, January 2015 (thesis)

2014
ps
Nowozin, S., Gehler, P. V., Jancsary, J., Lampert, C. H.
Advanced Structured Prediction
Advanced Structured Prediction, pages: 432, Neural Information Processing Series, MIT Press, November 2014 (book)
ei
Kober, J., Peters, J.
Learning Motor Skills: From Algorithms to Robot Experiments
97, pages: 191, Springer Tracts in Advanced Robotics, Springer, 2014 (book)
ei
Schultz, T., Nedjati-Gilani, G., Venkataraman, A., O’Donnell, L., Panagiotaki, E.
Computational Diffusion MRI and Brain Connectivity
pages: 255, Mathematics and Visualization, Springer, 2014 (book)
ei
Schmeißer, N.
Development of advanced methods for improving astronomical images
Eberhard Karls Universität Tübingen, Germany, Eberhard Karls Universität Tübingen, Germany, 2014 (diplomathesis)

ps
Pons-Moll, G.
Human Pose Estimation from Video and Inertial Sensors
Ph.D Thesis, -, 2014 (book)
2013
ei
pn
Schober, M.
Camera-specific Image Denoising
Eberhard Karls Universität Tübingen, Germany, October 2013 (diplomathesis)
ei
Schölkopf, B., Luo, Z., Vovk, V.
Empirical Inference - Festschrift in Honor of Vladimir N. Vapnik
Springer, 2013 (book)
2012
ei
Hooge, J.
Automatische Seitenkettenzuordnung zur NMR Proteinstrukturaufklärung mittels ganzzahliger linearer Programmierung
University of Tübingen, Germany, 2012 (diplomathesis)
ei
pn
Klenske, E. D.
Nonparametric System Identification and Control for Periodic Error Correction in Telescopes
University of Stuttgart, 2012 (diplomathesis)
al
Der, R., Martius, G.
The Playful Machine - Theoretical Foundation and Practical Realization of Self-Organizing Robots
Springer, Berlin Heidelberg, 2012 (book)
ps
Fossati, A., Gall, J., Grabner, H., Ren, X., Konolige, K.
Consumer Depth Cameras for Computer Vision - Research Topics and Applications
Advances in Computer Vision and Pattern Recognition, Springer, 2012 (book)
2011
ei
Sra, S., Nowozin, S., Wright, S.
Optimization for Machine Learning
pages: 494, Neural information processing series, MIT Press, Cambridge, MA, USA, December 2011 (book)
ei
Barber, D., Cemgil, A., Chiappa, S.
Bayesian Time Series Models
pages: 432, Cambridge University Press, Cambridge, UK, August 2011 (book)
ei
Lu, H., Schölkopf, B., Zhao, H.
Handbook of Statistical Bioinformatics
pages: 627, Springer Handbooks of Computational Statistics, Springer, Berlin, Germany, 2011 (book)
2010
ei
Zscheischler, J.
Inferring High-Dimensional Causal Relations using Free Probability Theory
Humboldt Universität Berlin, Germany, August 2010 (diplomathesis)
ei
Shelton, J.
Semi-supervised Subspace Learning and Application to Human Functional Magnetic Brain Resonance Imaging Data
Biologische Kybernetik, Eberhard Karls Universität, Tübingen, Germany, July 2010 (diplomathesis)
ei
Mantlik, F.
Quantitative Evaluation of MR-based Attenuation Correction for Positron Emission Tomography (PET)
Biologische Kybernetik, Universität Mannheim, Germany, March 2010 (diplomathesis)
ei
Sigaud, O., Peters, J.
From Motor Learning to Interaction Learning in Robots
pages: 538, Studies in Computational Intelligence ; 264, (Editors: O Sigaud, J Peters), Springer, Berlin, Germany, January 2010 (book)
ei
Rakitsch, B.
Finding Gene-Gene Interactions using Support Vector Machines
Eberhard Karls Universität Tübingen, Germany, 2010 (diplomathesis)
ei
Köhler, R.
Detecting the mincut in sparse random graphs
Eberhard Karls Universität Tübingen, Germany, 2010 (diplomathesis)
mms
Hirscher, M.
Handbook of Hydrogen Storage
pages: 353 p., Wiley-VCH, Weinheim, 2010 (book)
2009
ei
Mülling, K.
Motor Control and Learning in Table Tennis
Eberhard Karls Universität Tübingen, Gerrmany, 2009 (diplomathesis)
ei
Drewe, P.
Hierarchical Clustering and Density Estimation Based on k-nearest-neighbor graphs
Eberhard Karls Universität Tübingen, Germany, 2009 (diplomathesis)

2008
ps
John W. Eaton, David Bateman, Soren Hauberg
GNU Octave Manual Version 3
Network Theory Ltd., October 2008 (book)
ei
Kober, J.
Reinforcement Learning for Motor Primitives
Biologische Kybernetik, University of Stuttgart, Stuttgart, Germany, August 2008 (diplomathesis)
ei
Peters, J.
Asymmetries of Time Series under Inverting their Direction
Biologische Kybernetik, University of Heidelberg, August 2008 (diplomathesis)
ei
Peters, J.
Machine Learning for Robotics: Learning Methods for Robot Motor Skills
pages: 107 , (Editors: J Peters), VDM-Verlag, Saarbrücken, Germany, May 2008 (book)
ei
Berens, P.
Pairwise Correlations and Multineuronal Firing Patterns in
Primary Visual Cortex
Biologische Kybernetik, Eberhard Karls Universität Tübingen, Tübingen, Germany, April 2008 (diplomathesis)
ei
Schreiner, T.
Development and Application of a Python Scripting Framework for BCI2000
Biologische Kybernetik, Eberhard-Karls-Universität Tübingen, Tübingen, Germany, January 2008 (diplomathesis)
2007
ei
Jegelka, S.
Statistical Learning Theory Approaches to Clustering
Biologische Kybernetik, Eberhard-Karls-Universität Tübingen, Tübingen, Germany, November 2007 (diplomathesis)
ei
Bakir, G., Hofmann, T., Schölkopf, B., Smola, A., Taskar, B., Vishwanathan, S.
Predicting Structured Data
pages: 360, Advances in neural information processing systems, MIT Press, Cambridge, MA, USA, September 2007 (book)
ei
Bottou, L., Chapelle, O., DeCoste, D., Weston, J.
Large-Scale Kernel Machines
pages: 416, Neural Information Processing Series, MIT Press, Cambridge, MA, USA, September 2007 (book)
ei
Biessmann, F.
Error Correcting Codes for the P300 Visual Speller
Biologische Kybernetik, Eberhard-Karls-Universität Tübingen, Tübingen, Germany, July 2007 (diplomathesis)
ei
Sinz, FH.
A priori Knowledge from Non-Examples
Biologische Kybernetik, Eberhard-Karls-Universität Tübingen, Tübingen, Germany, March 2007 (diplomathesis)
ei
Raths, C.
Development of a Brain-Computer Interface Approach Based on Covert Attention to Tactile Stimuli
University of Tübingen, Germany, University of Tübingen, Germany, January 2007 (diplomathesis)
ei
Hofmann, M.
A Machine Learning Approach for Estimating the Attenuation Map for a Combined PET/MR Scanner
Biologische Kybernetik, Max-Planck Institute for Biological Cybernetics, Tübingen, Germany, 2007 (diplomathesis)
2006
ei
Nickisch, H.
Extraction of visual features from natural video data using Slow Feature Analysis
Biologische Kybernetik, Technische Universität Berlin, Berlin, Germany, September 2006 (diplomathesis)
ei
Chapelle, O., Schölkopf, B., Zien, A.
Semi-Supervised Learning
pages: 508, Adaptive computation and machine learning, MIT Press, Cambridge, MA, USA, September 2006 (book)
ei
Deisenroth, MP.
An Online-Computation Approach to Optimal Finite-Horizon State-Feedback Control of Nonlinear Stochastic Systems
Biologische Kybernetik, Universität Karlsruhe (TH), Karlsruhe, Germany, August 2006 (diplomathesis)
ei
Nowozin, S.
Object Classification using Local Image Features
Biologische Kybernetik, Technical University of Berlin, Berlin, Germany, May 2006 (diplomathesis)
ei
Huhle, B.
Kernel PCA for Image Compression
Biologische Kybernetik, Eberhard-Karls-Universität, Tübingen, Germany, April 2006 (diplomathesis)
ei
Rasmussen, CE., Williams, CKI.
Gaussian Processes for Machine Learning
pages: 248, Adaptive Computation and Machine Learning, MIT Press, Cambridge, MA, USA, January 2006 (book)