
2024
ei
von Kügelgen, J.
Identifiable Causal Representation Learning
University of Cambridge, UK, Cambridge, February 2024, (Cambridge-Tübingen-Fellowship) (phdthesis)
hi
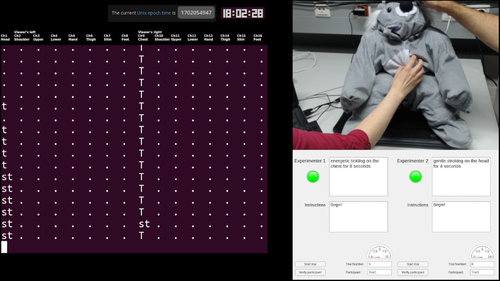
Burns, R.
Creating a Haptic Empathetic Robot Animal That Feels Touch and Emotion
University of Tübingen, Tübingen, Germany, February 2024, Department of Computer Science (phdthesis)
2023
rm
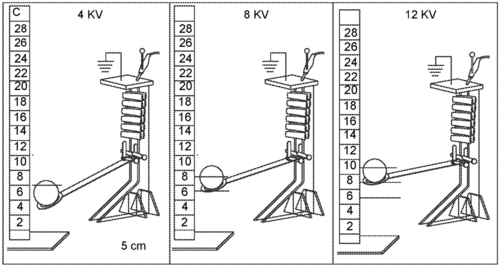
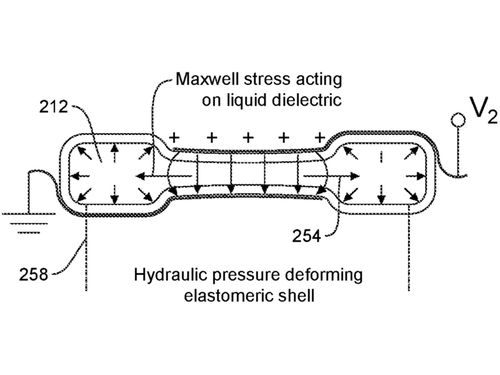
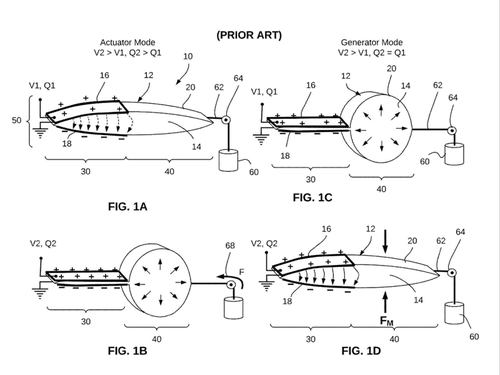
Keplinger, C. M., Acome, E. L., Kellaris, N. A., Mitchell, S. K.
Hydraulically Amplified Self-healing Electrostatic Actuators
(US Patent 11795979B2), October 2023 (patent)
hi
Mohan, M.
Gesture-Based Nonverbal Interaction for Exercise Robots
University of Tübingen, Tübingen, Germany, October 2023, Department of Computer Science (phdthesis)
rm
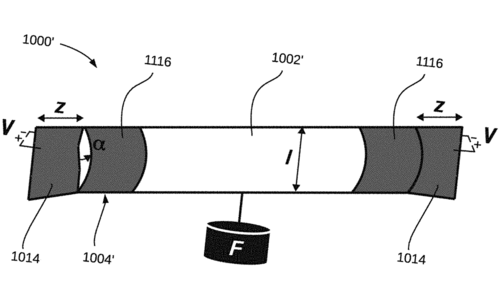
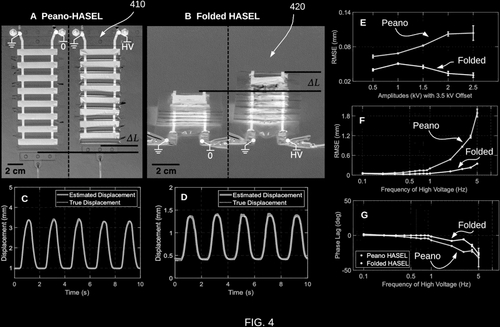
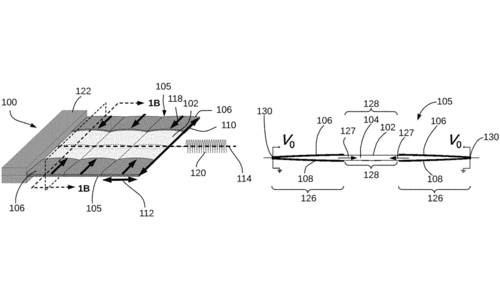
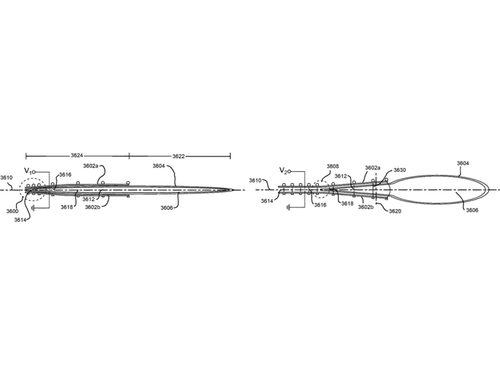
Keplinger, C. M., Wang, X., Mitchell, S. K.
High Strain Peano Hydraulically Amplified Self-Healing Electrostatic (HASEL) Transducers
(US Patent App. 18/138,621), August 2023 (patent)
ei
Karimi, A.
Advances in Algorithmic Recourse: Ensuring Causal Consistency, Fairness, & Robustness
ETH Zurich, Switzerland, July 2023 (phdthesis)
ei
Kübler, J. M.
Learning and Testing Powerful Hypotheses
University of Tübingen, Germany, July 2023 (phdthesis)
rm
Correll, N., Ly, K. D., Kellaris, N. A., Keplinger, C. M.
Capacitive Self-Sensing for Electrostatic Transducers with High Voltage Isolation
(US Patent App. 17/928,453), June 2023 (patent)
ei
Gresele, L.
Learning Identifiable Representations: Independent Influences and Multiple Views
University of Tübingen, Germany, June 2023 (phdthesis)
ei
Paulus, M.
Learning with and for discrete optimization
(ETH Zurich, Switzerland), May 2023, CLS PhD Program (phdthesis)
rm
Keplinger, C. M., Wang, X., Mitchell, S. K.
High Strain Peano Hydraulically Amplified Self-healing Electrostatic (HASEL) Transducers
(US Patent 11635094), April 2023 (patent)
ev
Strecke, M. F.
Object-Level Dynamic Scene Reconstruction With Physical Plausibility From RGB-D Images
Eberhard Karls Universität Tübingen, Tübingen, 2023 (phdthesis)
pi
Drotlef, D., Sitti, M., Amjadi, M.
Carrier, use of a carrier, method of activating a carrier and method of making a carrier
2023, US Patent App. 16/500,442 (patent)
pi
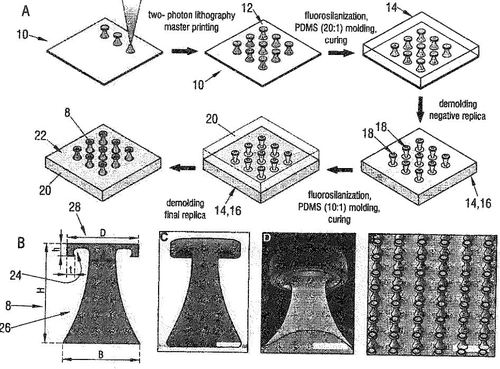
Sitti, M., Aksak, B.
Microfibers with mushroom-shaped tips for optimal adhesion
2023, US Patent 11,613,674 (patent)
pi
Son, D., Ugurlu, M., Bluemer, P., Sitti, M.
Magnetic trap system and method of navigating a microscopic device
2023, US Patent App. 17/871,598 (patent)
pi
Sitti, M., Drotlef, D., Liimatainen, V.
A Liquid Repellent Fibrillar Dry Adhesive Material and a Method of Producing the Same
2023, US Patent App. 17/785,452 (patent)
pi
Sitti, M., Son, D., Dong, X.
Simultaneous calibration method for magnetic localization and actuation systems
2023, US Patent 11,717,142 (patent)
mms
Schulz, Frank Martin Ernst
Static and dynamic investigation of magnonic systems: materials, applications and modeling
Universität Stuttgart, Stuttgart, 2023 (phdthesis)
2022
pi
Metin Sitti, Michael Murphy, Burak Aksak
DRY ADHESIVES AND METHODS FOR MAKING DRY ADHESIVES
December 2022, US Patent App. 17/895,334, 2022 (patent)
ps
Choutas, V.
Reconstructing Expressive 3D Humans from RGB Images
ETH Zurich, Max Planck Institute for Intelligent Systems and ETH Zurich, December 2022 (thesis)
hi
Richardson, B.
Multi-Timescale Representation Learning of Human and Robot Haptic Interactions
University of Stuttgart, Stuttgart, Germany, December 2022, Faculty of Computer Science, Electrical Engineering and Information Technology (phdthesis)
rm
Keplinger, C. M., Acome, E. L., Kellaris, N. A., Mitchell, S. K., Morrissey, T. G.
Hydraulically Amplified Self-healing Electrostatic Transducers Harnessing Zipping Mechanism
(US Patent 11486421B2), November 2022 (patent)
ei
Neitz, A.
Towards learning mechanistic models at the right level of abstraction
University of Tübingen, Germany, November 2022 (phdthesis)
rm
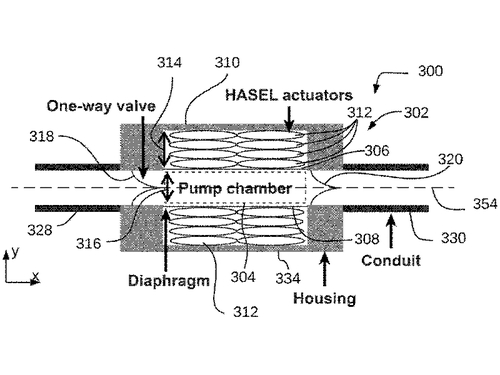
Mitchell, S. K., Acome, E. L., Keplinger, C. M.
Hydraulically Amplified Self-Healing Electrostatic (HASEL) Pumps
(US Patent App. 17/635,339), October 2022 (patent)
ei
Lu, C.
Learning Causal Representations for Generalization and Adaptation in Supervised, Imitation, and Reinforcement Learning
University of Cambridge, UK, Cambridge, October 2022, (Cambridge-Tübingen-Fellowship) (phdthesis)
hi
Nam, S.
Understanding the Influence of Moisture on Fingerpad-Surface Interactions
University of Tübingen, Tübingen, Germany, October 2022, Department of Computer Science (phdthesis)
re
Jähnichen, S., Weber, F., Prentice, M., Lieder, F.
Does deliberate prospection help students set better goals?
KogWis 2022 "Understanding Minds", September 2022 (poster) Accepted
ei
Tabibian, B.
Methods for Minimizing the Spread of Misinformation on the Web
University of Tübingen, Germany, September 2022 (phdthesis)
rm
Keplinger, C. M., Acome, E. L., Kellaris, N. A., Mitchell, S. K.
Hydraulically Amplified Self-healing Electrostatic Actuators
(US Patent 11408452), August 2022 (patent)
ei
Huang, B.
Learning and Using Causal Knowledge: A Further Step Towards a Higher-Level Intelligence
Carnegie Mellon University, Pittsburgh, USA, July 2022 (phdthesis)
rm
Keplinger, C. M., Mitchell, S. K., Kellaris, N. A., Rothemund, P.
Composite Layering of Hydraulically Amplified Self-Healing Electrostatic Transducers
(US Patent App. 17436455), May 2022 (patent)
ei
Ialongo, A.
Variational Inference in Dynamical Systems
University of Cambridge, UK, Cambridge, February 2022, (Cambridge-Tübingen-Fellowship) (phdthesis)
mms
Groß, F.
Entwicklung von Methoden und Bausteinen zur Realisierung Komplexer Magnonischer Systeme
Universität Stuttgart, Stuttgart (und Cuvillier Verlag, Göttingen), 2022 (phdthesis)
al
Sun, H.
Machine-Learning-Driven Haptic Sensor Design
University of Tuebingen, Library, 2022 (phdthesis)
mms
Dogan, G.
Deposition and characterization of multi-functional, complex thin films using atomic layer deposition for copper corrosion protection
Universität Stuttgart, Stuttgart, 2022 (phdthesis)
2021
ics
Doerr, A.
Models for Data-Efficient Reinforcement Learning on Real-World Applications
University of Stuttgart, Stuttgart, October 2021 (phdthesis)
ei
Mehrjou, A.
Dynamics of Learning and Learning of Dynamics
ETH Zürich, Zürich, October 2021 (phdthesis)
ei
Hohmann, M.
A Large Scale Brain-Computer Interface for Patients with Neurological Diseases
University of Tübingen, Germany, September 2021 (phdthesis)
ei
Parascandolo, G.
Deep Learning Beyond The Training Distribution
ETH Zürich, Switzerland, Zürich, September 2021, (CLS Fellowship Program) (phdthesis)
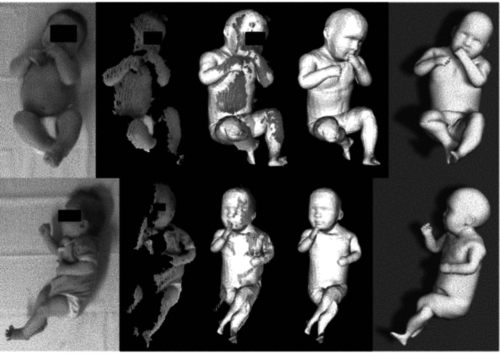
ps
Hesse, N., Pujades, S., Romero, J., Black, M.
Skinned multi-infant linear body model
(US Patent 11,127,163, 2021), September 2021 (patent)
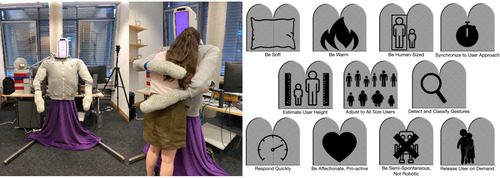
hi
Block, A. E.
HuggieBot: An Interactive Hugging Robot With Visual and Haptic Perception
ETH Zürich, Zürich, August 2021, Department of Computer Science (phdthesis)
pf
Yu, T.
Chemically active micromotors
University of Stuttgart, Stuttgart, July 2021 (phdthesis)
mms
Träger, N.
Röntgenmikroskopische Untersuchungen der Magnetisierungsdynamik in nanoskaligen magnonischen Wellenleiterstrukturen
Universität Stuttgart, Stuttgart (und Cuvillier Verlag, Göttingen), June 2021 (phdthesis)
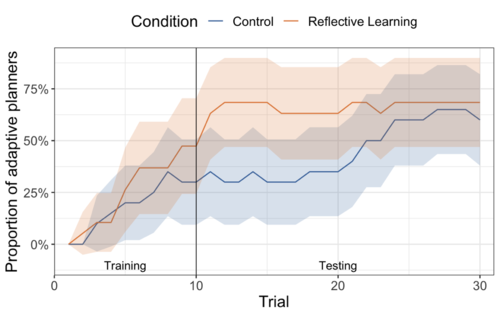
re
Frederic Becker, , Lieder, F.
Promoting metacognitive learning through systematic reflection
The first edition of Life Improvement Science Conference, June 2021 (poster)
ei
Raj, A.
Optimization Algorithms for Machine Learning
University of Tübingen, Germany, June 2021 (phdthesis)
ei
Meding, K.
Causal Inference in Vision
Eberhard Karls Universität Tübingen, Tübingen, June 2021 (phdthesis)
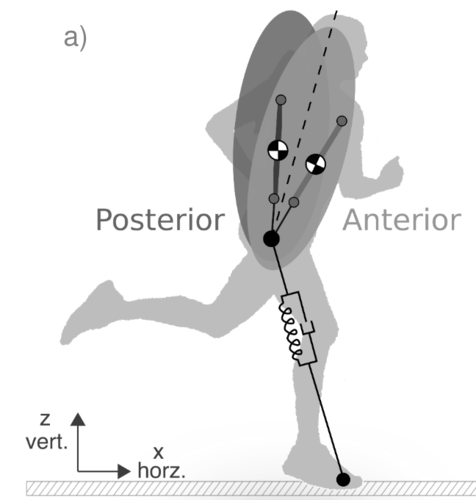
dlg
Drama, Ö.
Control Mechanisms for Postural Stability and Trunk Motion in Bipedal Running. A Numerical Study for Humans, Avians, and Bipedal Robots
Universität Stuttgart, Stuttgart, May 2021 (phdthesis)
ei
Bradshaw, J.
Machine Learning Methods for Modeling Synthesizable Molecules
University of Cambridge, UK, Cambridge, April 2021, (Cambridge-Tübingen-Fellowship) (phdthesis)
pf
Günther, J.
Advanced Diffusion Studies of Active Enzymes and Nanosystems
Universität Stuttgart, Stuttgart (und Cuvillier Verlag, Göttingen), February 2021 (phdthesis)