
2024
ei
von Kügelgen, J.
Identifiable Causal Representation Learning
University of Cambridge, UK, Cambridge, February 2024, (Cambridge-Tübingen-Fellowship) (phdthesis)
hi
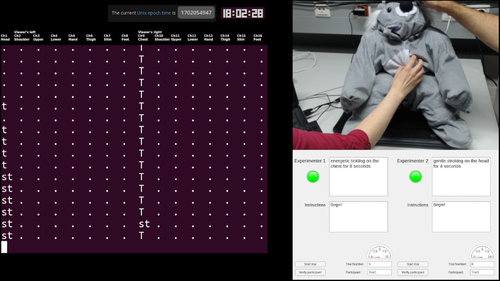
Burns, R.
Creating a Haptic Empathetic Robot Animal That Feels Touch and Emotion
University of Tübingen, Tübingen, Germany, February 2024, Department of Computer Science (phdthesis)
2023
hi
Mohan, M.
Gesture-Based Nonverbal Interaction for Exercise Robots
University of Tübingen, Tübingen, Germany, October 2023, Department of Computer Science (phdthesis)
ei
Karimi, A.
Advances in Algorithmic Recourse: Ensuring Causal Consistency, Fairness, & Robustness
ETH Zurich, Switzerland, July 2023 (phdthesis)
ei
Kübler, J. M.
Learning and Testing Powerful Hypotheses
University of Tübingen, Germany, July 2023 (phdthesis)
ei
Gresele, L.
Learning Identifiable Representations: Independent Influences and Multiple Views
University of Tübingen, Germany, June 2023 (phdthesis)
ei
Paulus, M.
Learning with and for discrete optimization
(ETH Zurich, Switzerland), May 2023, CLS PhD Program (phdthesis)
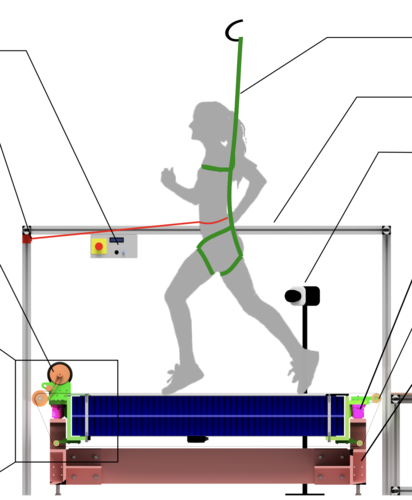
dlg
Sarvestani, A., Ruppert, F., Badri-Spröwitz, A.
An Open-Source Modular Treadmill for Dynamic Force Measurement with Load Dependant Range Adjustment
2023 (unpublished) Submitted
ei
Jin, Z., Mihalcea, R.
Natural Language Processing for Policymaking
In Handbook of Computational Social Science for Policy, pages: 141-162, 7, (Editors: Bertoni, E. and Fontana, M. and Gabrielli, L. and Signorelli, S. and Vespe, M.), Springer International Publishing, 2023 (inbook)
ev
Strecke, M. F.
Object-Level Dynamic Scene Reconstruction With Physical Plausibility From RGB-D Images
Eberhard Karls Universität Tübingen, Tübingen, 2023 (phdthesis)
ei
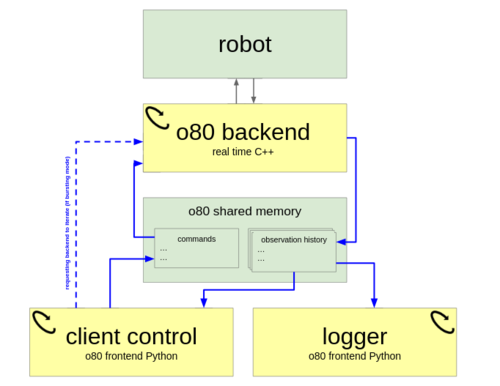
Berenz, V., Widmaier, F., Guist, S., Schölkopf, B., Büchler, D.
Synchronizing Machine Learning Algorithms, Realtime Robotic Control and Simulated Environment with o80
Robot Software Architectures Workshop (RSA) 2023, ICRA, 2023 (techreport)
ev
Elich, C., Kirchdorfer, L., Köhler, J. M., Schott, L.
Challenging Common Assumptions in Multi-task Learning
abs/2311.04698, CoRR/arxiv, 2023 (techreport)
mms
Schulz, Frank Martin Ernst
Static and dynamic investigation of magnonic systems: materials, applications and modeling
Universität Stuttgart, Stuttgart, 2023 (phdthesis)
2022
hi
Richardson, B.
Multi-Timescale Representation Learning of Human and Robot Haptic Interactions
University of Stuttgart, Stuttgart, Germany, December 2022, Faculty of Computer Science, Electrical Engineering and Information Technology (phdthesis)
ei
Neitz, A.
Towards learning mechanistic models at the right level of abstraction
University of Tübingen, Germany, November 2022 (phdthesis)
re
Lieder, F., Prentice, M.
Life Improvement Science
In Encyclopedia of Quality of Life and Well-Being Research, Springer, November 2022 (inbook)
ei
Lu, C.
Learning Causal Representations for Generalization and Adaptation in Supervised, Imitation, and Reinforcement Learning
University of Cambridge, UK, Cambridge, October 2022, (Cambridge-Tübingen-Fellowship) (phdthesis)
hi
Nam, S.
Understanding the Influence of Moisture on Fingerpad-Surface Interactions
University of Tübingen, Tübingen, Germany, October 2022, Department of Computer Science (phdthesis)
ei
Tabibian, B.
Methods for Minimizing the Spread of Misinformation on the Web
University of Tübingen, Germany, September 2022 (phdthesis)
ei
Huang, B.
Learning and Using Causal Knowledge: A Further Step Towards a Higher-Level Intelligence
Carnegie Mellon University, Pittsburgh, USA, July 2022 (phdthesis)
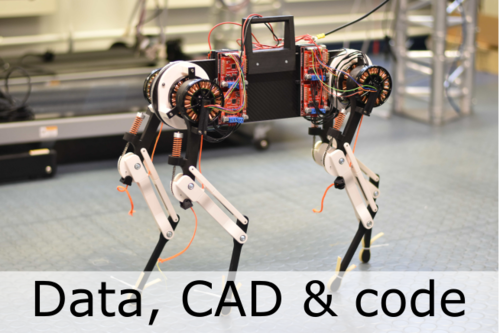
dlg
Ruppert, F., Badri-Spröwitz, A.
Learning Plastic Matching of Robot Dynamics in Closed-Loop Central Pattern Generators: Data
Edmond, May 2022 (techreport)
dlg
pi
Badri-Spröwitz, A., Sarvestani, A. A., Sitti, M., Daley, M. A.
Data for BirdBot Achieves Energy-Efficient Gait with Minimal Control Using Avian-Inspired Leg Clutching
Edmond, March 2022 (techreport)
ei
Ialongo, A.
Variational Inference in Dynamical Systems
University of Cambridge, UK, Cambridge, February 2022, (Cambridge-Tübingen-Fellowship) (phdthesis)
ev
Li, H., Stueckler, J.
Observability Analysis of Visual-Inertial Odometry with Online Calibration of Velocity-Control Based Kinematic Motion Models
abs/2204.06651, CoRR/arxiv, 2022 (techreport)
mms
Groß, F.
Entwicklung von Methoden und Bausteinen zur Realisierung Komplexer Magnonischer Systeme
Universität Stuttgart, Stuttgart (und Cuvillier Verlag, Göttingen), 2022 (phdthesis)
al
Sun, H.
Machine-Learning-Driven Haptic Sensor Design
University of Tuebingen, Library, 2022 (phdthesis)
ei
Peters, J., Bauer, S., Pfister, N.
Causal Models for Dynamical Systems
In Probabilistic and Causal Inference: The Works of Judea Pearl, pages: 671-690, 1, Association for Computing Machinery, 2022 (inbook)
mms
Dogan, G.
Deposition and characterization of multi-functional, complex thin films using atomic layer deposition for copper corrosion protection
Universität Stuttgart, Stuttgart, 2022 (phdthesis)
ei
plg
Karimi, A. H., von Kügelgen, J., Schölkopf, B., Valera, I.
Towards Causal Algorithmic Recourse
In xxAI - Beyond Explainable AI: International Workshop, Held in Conjunction with ICML 2020, July 18, 2020, Vienna, Austria, Revised and Extended Papers, pages: 139-166, (Editors: Holzinger, Andreas and Goebel, Randy and Fong, Ruth and Moon, Taesup and Müller, Klaus-Robert and Samek, Wojciech), Springer International Publishing, 2022 (inbook)
ei
Schölkopf, B.
Causality for Machine Learning
In Probabilistic and Causal Inference: The Works of Judea Pearl, pages: 765-804, 1, Association for Computing Machinery, New York, NY, USA, 2022 (inbook)
ei
Salewski, L., Koepke, A. S., Lensch, H. P. A., Akata, Z.
CLEVR-X: A Visual Reasoning Dataset for Natural Language Explanations
In xxAI - Beyond Explainable AI: International Workshop, Held in Conjunction with ICML 2020, July 18, 2020, Vienna, Austria, Revised and Extended Papers, pages: 69-88, (Editors: Holzinger, Andreas and Goebel, Randy and Fong, Ruth and Moon, Taesup and Müller, Klaus-Robert and Samek, Wojciech), Springer International Publishing, 2022 (inbook)
2021
pf
Qiu, T., Jeong, M., Goyal, R., Kadiri, V., Sachs, J., Fischer, P.
Magnetic Micro-/Nanopropellers for Biomedicine
In Field-Driven Micro and Nanorobots for Biology and Medicine, pages: 389-410, 16, (Editors: Sun, Y. and Wang, X. and Yu, J.), Springer Nature, November 2021 (inbook)
ics
Doerr, A.
Models for Data-Efficient Reinforcement Learning on Real-World Applications
University of Stuttgart, Stuttgart, October 2021 (phdthesis)
ei
Mehrjou, A.
Dynamics of Learning and Learning of Dynamics
ETH Zürich, Zürich, October 2021 (phdthesis)
ei
Hohmann, M.
A Large Scale Brain-Computer Interface for Patients with Neurological Diseases
University of Tübingen, Germany, September 2021 (phdthesis)
ei
Parascandolo, G.
Deep Learning Beyond The Training Distribution
ETH Zürich, Switzerland, Zürich, September 2021, (CLS Fellowship Program) (phdthesis)
rm
Purnendu, , Novack, S., Acome, E., Alistar, M., Keplinger, C., Gross, M. D., Bruns, C., Leithinger, D.
Electriflow: Augmenting Books With Tangible Animation Using Soft Electrohydraulic Actuators
In ACM SIGGRAPH 2021 Labs, pages: 1-2, Association for Computing Machinery, SIGGRAPH 2021, August 2021 (inbook)
hi
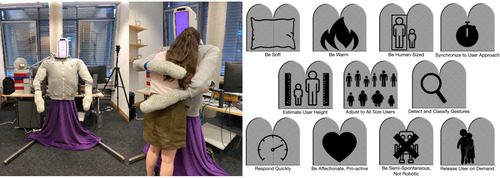
Block, A. E.
HuggieBot: An Interactive Hugging Robot With Visual and Haptic Perception
ETH Zürich, Zürich, August 2021, Department of Computer Science (phdthesis)
pf
Yu, T.
Chemically active micromotors
University of Stuttgart, Stuttgart, July 2021 (phdthesis)
mms
Träger, N.
Röntgenmikroskopische Untersuchungen der Magnetisierungsdynamik in nanoskaligen magnonischen Wellenleiterstrukturen
Universität Stuttgart, Stuttgart (und Cuvillier Verlag, Göttingen), June 2021 (phdthesis)
ei
Raj, A.
Optimization Algorithms for Machine Learning
University of Tübingen, Germany, June 2021 (phdthesis)
ei
Meding, K.
Causal Inference in Vision
Eberhard Karls Universität Tübingen, Tübingen, June 2021 (phdthesis)
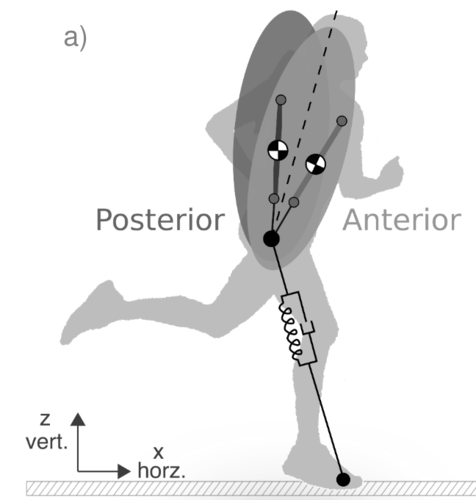
dlg
Drama, Ö.
Control Mechanisms for Postural Stability and Trunk Motion in Bipedal Running. A Numerical Study for Humans, Avians, and Bipedal Robots
Universität Stuttgart, Stuttgart, May 2021 (phdthesis)
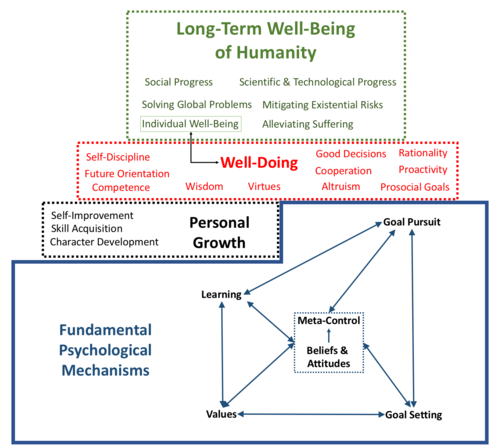
re
Lieder, F., Prentice, M., Corwin-Renner, E.
Toward a Science of Effective Well-Doing
May 2021 (techreport)
ei
Bradshaw, J.
Machine Learning Methods for Modeling Synthesizable Molecules
University of Cambridge, UK, Cambridge, April 2021, (Cambridge-Tübingen-Fellowship) (phdthesis)
pf
Günther, J.
Advanced Diffusion Studies of Active Enzymes and Nanosystems
Universität Stuttgart, Stuttgart (und Cuvillier Verlag, Göttingen), February 2021 (phdthesis)
pi
Sitti, M., Liimatainen, V.
Method of making one or more fibrils, computer implemented method of simulating an adhesive force of one or more fibrils and fibril
2021, EP Prio. Patent App. 21 162 253.5 (mpi_year_book)
2020
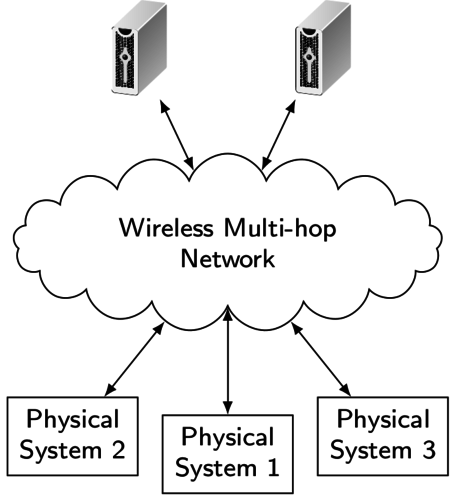
ics
Baumann, D.
Learning and Control Strategies for Cyber-physical Systems: From Wireless Control over Deep Reinforcement Learning to Causal Identification
KTH Royal Institute of Technology, Stockholm, Sweden, December 2020 (phdthesis)
hi
Young, E. M.
Delivering Expressive and Personalized Fingertip Tactile Cues
University of Pennsylvania, Philadelphia, PA, December 2020, Department of Mechanical Engineering and Applied Mechanics (phdthesis)
ei
Mastakouri, A.
Causal Feature Selection in Neuroscience
University of Tübingen, Germany, December 2020 (phdthesis)