Continuously distributed magnetization profile for millimeter-scale elastomeric undulatory swimming
2014
Article
pi
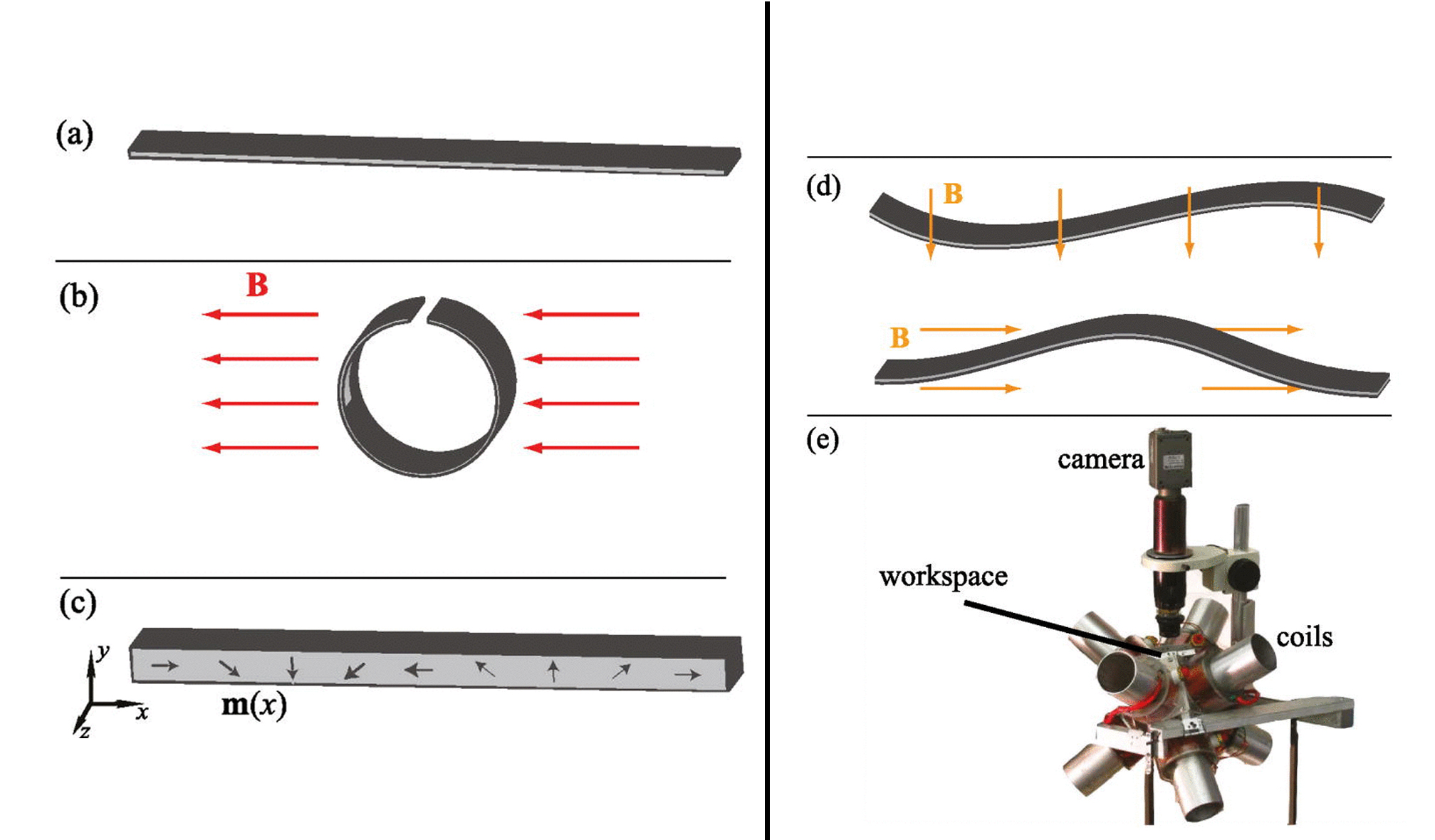
We have developed a millimeter-scale magnetically driven swimming robot for untethered motion at mid to low Reynolds numbers. The robot is propelled by continuous undulatory deformation, which is enabled by the distributed magnetization profile of a flexible sheet. We demonstrate control of a prototype device and measure deformation and speed as a function of magnetic field strength and frequency. Experimental results are compared with simple magnetoelastic and fluid propulsion models. The presented mechanism provides an efficient remote actuation method at the millimeter scale that may be suitable for further scaling down in size for microrobotics applications in biotechnology and healthcare
| Author(s): | Diller, Eric and Zhuang, Jiang and Zhan Lum, Guo and Edwards, Matthew R and Sitti, Metin |
| Journal: | Applied Physics Letters |
| Volume: | 104 |
| Number (issue): | 17 |
| Pages: | 174101 |
| Year: | 2014 |
| Publisher: | AIP |
| Department(s): | Physical Intelligence |
| Bibtex Type: | Article (article) |
| DOI: | https://doi.org/10.1063/1.4874306 |
| URL: | http://aip.scitation.org/doi/full/10.1063/1.4874306 |
|
BibTex @article{diller2014continuously,
title = {Continuously distributed magnetization profile for millimeter-scale elastomeric undulatory swimming},
author = {Diller, Eric and Zhuang, Jiang and Zhan Lum, Guo and Edwards, Matthew R and Sitti, Metin},
journal = {Applied Physics Letters},
volume = {104},
number = {17},
pages = {174101},
publisher = {AIP},
year = {2014},
doi = {https://doi.org/10.1063/1.4874306},
url = {http://aip.scitation.org/doi/full/10.1063/1.4874306}
}
|
|