Departments
- Autonomous Motion
- Empirical Inference
- Haptic Intelligence
- Modern Magnetic Systems
- Perceiving Systems
- Physical Intelligence
- Robotic Materials
- Social Foundations of Computation
- Theory of Inhomogeneous Condensed Matter
Research Groups
- Autonomous Vision
- Autonomous Learning
- Bioinspired Autonomous Miniature Robots
- Biomimetic Materials and Machines
- Dynamic Locomotion
- Embodied Vision
- Human Aspects of Machine Learning
- Intelligent Control Systems
- Learning and Dynamical Systems
- Locomotion in Biorobotic and Somatic Systems
- Micro, Nano, and Molecular Systems
- Movement Generation and Control
- Neural Capture and Synthesis
- Organizational Leadership and Diversity
- Physics for Inference and Optimization
- Probabilistic Learning Group
- Probabilistic Numerics
- Rationality Enhancement
- Robust Machine Learning
- Nanorobotic Biosensors
- Smart Nanoplasmonics
Publication Type
- Article
- Bachelor Thesis
- Book
- Book Chapter
- Conference Paper
- MPI Year Book
- Manual
- Master Thesis
- Miscellaneous
- Patent
- Ph.D. Thesis
- Poster
- Proceedings
- Talk
- Technical Report
- Thesis
- Unpublished
2023
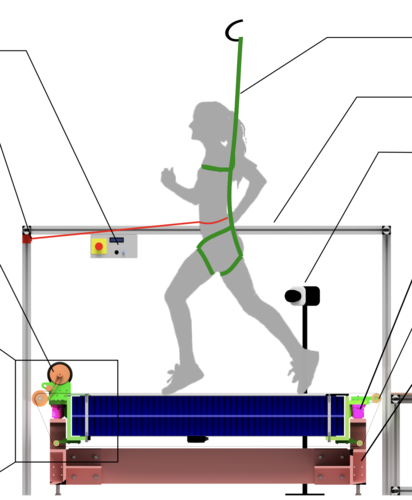
An Open-Source Modular Treadmill for Dynamic Force Measurement with Load Dependant Range Adjustment
Sarvestani, A., Ruppert, F., Badri-Spröwitz, A.
2023 (unpublished) Submitted
dlg
2023
dlg
Sarvestani, A., Ruppert, F., Badri-Spröwitz, A.
An Open-Source Modular Treadmill for Dynamic Force Measurement with Load Dependant Range Adjustment
2023 (unpublished) Submitted
2019
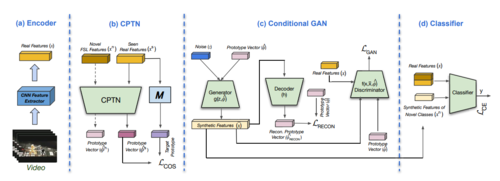
ProtoGAN: Towards Few Shot Learning for Action Recognition
Dwivedi, S. K., Gupta, V., Mitra, R., Ahmed, S., Jain, A.
Proc. International Conference on Computer Vision (ICCV) Workshops, October 2019 (manual)
ps
2019
ps
Dwivedi, S. K., Gupta, V., Mitra, R., Ahmed, S., Jain, A.
ProtoGAN: Towards Few Shot Learning for Action Recognition
Proc. International Conference on Computer Vision (ICCV) Workshops, October 2019 (manual)
2014

Learning People Detectors for Tracking in Crowded Scenes.
Tang, S., Andriluka, M., Milan, A., Schindler, K., Roth, S., Schiele, B.
2014, Scene Understanding Workshop (SUNw, CVPR workshop) (unpublished)ps
2014
ps
Tang, S., Andriluka, M., Milan, A., Schindler, K., Roth, S., Schiele, B.
Learning People Detectors for Tracking in Crowded Scenes.
2014, Scene Understanding Workshop (SUNw, CVPR workshop) (unpublished)