
2022
ei
Schölkopf, B.
Causality, causal digital twins, and their applications
Machine Learning for Science: Bridging Data-Driven and Mechanistic Modelling (Dagstuhl Seminar 22382), (Editors: Berens, Philipp and Cranmer, Kyle and Lawrence, Neil D. and von Luxburg, Ulrike and Montgomery, Jessica), September 2022 (talk)
2021
ev
Strecke, M., Stückler, J.
Physically Plausible Tracking & Reconstruction of Dynamic Objects
KIT Science Week Scientific Conference & DGR-Days 2021, October 2021 (talk)
re
Heindrich, L., Consul, S., Stojcheski, J., Lieder, F.
Improving Human Decision-Making by Discovering Efficient Strategies for Hierarchical Planning
Tübingen, Germany, The first edition of Life Improvement Science Conference, June 2021 (talk) Accepted
pi
Sitti, M., Liimatainen, V.
Method of making one or more fibrils, computer implemented method of simulating an adhesive force of one or more fibrils and fibril
2021, EP Prio. Patent App. 21 162 253.5 (mpi_year_book)
ei
Belousov, B., H., A., Klink, P., Parisi, S., Peters, J.
Reinforcement Learning Algorithms: Analysis and Applications
883, Studies in Computational Intelligence, Springer International Publishing, 2021 (book)
2020
dlg
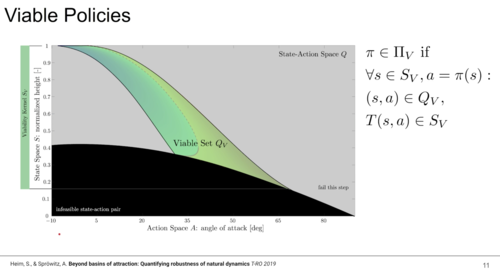
Heim, S., Badri-Spröwitz, A.
Beyond Basins of Attraction: Quantifying Robustness of Natural Dynamics
May 2020 (talk)

avg
Janai, J., Güney, F., Behl, A., Geiger, A.
Computer Vision for Autonomous Vehicles: Problems, Datasets and State-of-the-Art
Arxiv, Foundations and Trends in Computer Graphics and Vision, 2020 (book)
2019
ei
Safavi, S., Logothetis, N., Besserve, M.
Multivariate coupling estimation between continuous signals and point processes
Neural Information Processing Systems 2019 - Workshop on Learning with Temporal Point Processes, December 2019 (talk)

ei
hi
ps
pi
Scientific Report 2016 - 2018
2019 (mpi_year_book)
mms
Keskinbora, K.
Prototyping Micro- and Nano-Optics with Focused Ion Beam Lithography
SL48, pages: 46, SPIE.Spotlight, SPIE Press, Bellingham, WA, 2019 (book)
2018
dlg
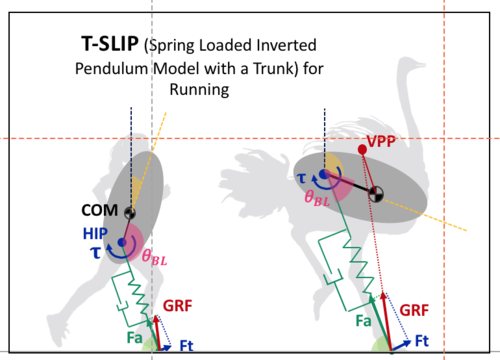
Drama, Ö.
Impact of Trunk Orientation for Dynamic Bipedal Locomotion
Dynamic Walking Conference, May 2018 (talk)
pf
Wu, Z., Troll, J., Jeong, H., Qiang, W., Stang, M., Ziemssen, F., Wang, Z., Dong, M., Schnichels, S., Qiu, T., Fischer, P.
Nanorobots propel through the eye
Max Planck Society, 2018 (mpi_year_book)
2017
ei
Peters, J., Janzing, D., Schölkopf, B.
Elements of Causal Inference - Foundations and Learning Algorithms
Adaptive Computation and Machine Learning Series, The MIT Press, Cambridge, MA, USA, 2017 (book)
pi
Sitti, M.
Mobile Microrobotics
Mobile Microrobotics, The MIT Press, Cambridge, MA, 2017 (book)
2015
ei
Besserve, M.
Causal Inference for Empirical Time Series Based on the Postulate of Independence of Cause and Mechanism
53rd Annual Allerton Conference on Communication, Control, and Computing, September 2015 (talk)
ei
Besserve, M.
Independence of cause and mechanism in brain networks
DALI workshop on Networks: Processes and Causality, April 2015 (talk)
ei
Chaves, R., Majenz, C., Luft, L., Maciel, T., Janzing, D., Schölkopf, B., Gross, D.
Information-Theoretic Implications of Classical and Quantum Causal Structures
18th Conference on Quantum Information Processing (QIP), 2015 (talk)
ei
Foreman-Mackey, D., Hogg, D. W., Schölkopf, B.
The search for single exoplanet transits in the Kepler light curves
IAU General Assembly, 22, pages: 2258352, 2015 (talk)

2014
ps
Nowozin, S., Gehler, P. V., Jancsary, J., Lampert, C. H.
Advanced Structured Prediction
Advanced Structured Prediction, pages: 432, Neural Information Processing Series, MIT Press, November 2014 (book)
ei
Kober, J., Peters, J.
Learning Motor Skills: From Algorithms to Robot Experiments
97, pages: 191, Springer Tracts in Advanced Robotics, Springer, 2014 (book)
ei
Besserve, M., Schölkopf, B., Logothetis, N. K.
Unsupervised identification of neural events in local field potentials
44th Annual Meeting of the Society for Neuroscience (Neuroscience), 2014 (talk)
ei
Besserve, M.
Quantifying statistical dependency
Research Network on Learning Systems Summer School, 2014 (talk)
ei
Janzing, D.
Causal Inference from Passive Observations
24th Summer School University of Jyväskylā, Finland, August, 2014 (talk)
2013
ei
Logothetis, N., Eschenko, O., Murayama, Y., Augath, M., Steudel, T., Evrard, H., Besserve, M., Oeltermann, A.
Studying large-scale brain networks: electrical stimulation and neural-event-triggered fMRI
Twenty-Second Annual Computational Neuroscience Meeting (CNS*2013), July 2013, journal = {BMC Neuroscience},
year = {2013},
month = {7},
volume = {14},
number = {Supplement 1},
pages = {A1}, (talk)
ei
Mantlik, F., Bezrukov, I., Hofmann, M., Schölkopf, B., Pichler, B.
MR-Based Attenuation Correction for Combined Brain PET/MR: Robustness of Atlas- and Pattern Recognition Method to Atlas Registration Failures
IEEE Nuclear Science Symposium and Medical Imaging Conference (IEEE MIC), 2013 (talk)
ei
Muandet, K.
Domain Generalization via Invariant Feature Representation
30th International Conference on Machine Learning (ICML2013), 2013 (talk)
ei
Schölkopf, B., Luo, Z., Vovk, V.
Empirical Inference - Festschrift in Honor of Vladimir N. Vapnik
Springer, 2013 (book)
2012
ei
Muandet, K.
Support Vector Machines, Support Measure Machines, and Quasar Target Selection
Center for Cosmology and Particle Physics (CCPP), New York University, December 2012 (talk)
ei
Muandet, K.
Hilbert Space Embedding for Dirichlet Process Mixtures
NIPS Workshop on Confluence between Kernel Methods and Graphical Models, December 2012 (talk)
ei
Wehrl, H., Lankes, K., Hossain, M., Bezrukov, I., Liu, C., Martirosian, P., Schick, F., Pichler, B.
Simultaneous small animal PET/MR in activated and resting state reveals multiple brain networks
20th Annual Meeting and Exhibition of the International Society for Magnetic Resonance in Medicine (ISMRM), May 2012 (talk)
ei
Wehrl, H., Lankes, K., Hossain, M., Bezrukov, I., Liu, C., Martirosian, P., Reischl, G., Schick, F., Pichler, B.
A new PET insert for simultaneous PET/MR small animal imaging
20th Annual Meeting and Exhibition of the International Society for Magnetic Resonance in Medicine (ISMRM), May 2012 (talk)
ei
Hossain, M., Wehrl, H., Lankes, K., Liu, C., Bezrukov, I., Reischl, G., Pichler, B.
Evaluation of a new, large field of view, small animal PET/MR system
50. Jahrestagung der Deutschen Gesellschaft fuer Nuklearmedizin (NuklearMedizin), April 2012 (talk)
ei
Muandet, K.
Support Measure Machines for Quasar Target Selection
Astro Imaging Workshop, 2012 (talk)
ei
Seldin, Y.
PAC-Bayesian Analysis: A Link Between Inference and Statistical Physics
Workshop on Statistical Physics of Inference and Control Theory, 2012 (talk)
ei
Liu, C., Hossain, M., Lankes, K., Bezrukov, I., Wehrl, H., Kolb, A., Judenhofer, M., Pichler, B.
PET Performance Measurements of a Next Generation Dedicated Small Animal PET/MR Scanner
Nuclear Science Symposium and Medical Imaging Conference (NSS-MIC), 2012 (talk)
ei
Wehrl, H., Hossain, M., Lankes, K., Liu, C., Bezrukov, I., Martirosian, P., Reischl, G., Schick, F., Pichler, B.
Simultaneous small animal PET/MR reveals different brain networks during stimulation and rest
World Molecular Imaging Congress (WMIC), 2012 (talk)
ei
Seldin, Y., Laviolette, F., Shawe-Taylor, J.
PAC-Bayesian Analysis of Supervised, Unsupervised, and Reinforcement Learning
Tutorial at the 29th International Conference on Machine Learning (ICML), 2012 (talk)
ei
Bezrukov, I., Schmidt, H., Mantlik, F., Schwenzer, N., Brendle, C., Pichler, B.
Influence of MR-based attenuation correction on lesions within bone and susceptibility artifact regions
Molekulare Bildgebung (MoBi), 2012 (talk)
ei
Boularias, A., Kroemer, O., Peters, J.
Structured Apprenticeship Learning
European Workshop on Reinforcement Learning (EWRL), 2012 (talk)
ei
Seldin, Y., Laviolette, F., Shawe-Taylor, J.
PAC-Bayesian Analysis and Its Applications
Tutorial at The European Conference on Machine Learning and Principles and Practice of Knowledge Discovery in Databases (ECML-PKDD), 2012 (talk)
ei
Deisenroth, M., Peters, J.
Solving Nonlinear Continuous State-Action-Observation POMDPs for Mechanical Systems with Gaussian Noise
European Workshop on Reinforcement Learning (EWRL), 2012 (talk)
ei
Nishiyama, Y., Boularias, A., Gretton, A., Fukumizu, K.
Kernel Bellman Equations in POMDPs
Technical Committee on Infomation-Based Induction Sciences and Machine Learning (IBISML'12), 2012 (talk)
ei
Panagiotaropoulos, T., Besserve, M., Logothetis, N.
Beta oscillations propagate as traveling waves in the macaque prefrontal cortex
42nd Annual Meeting of the Society for Neuroscience (Neuroscience), 2012 (talk)
al
Der, R., Martius, G.
The Playful Machine - Theoretical Foundation and Practical Realization of Self-Organizing Robots
Springer, Berlin Heidelberg, 2012 (book)
ps
Fossati, A., Gall, J., Grabner, H., Ren, X., Konolige, K.
Consumer Depth Cameras for Computer Vision - Research Topics and Applications
Advances in Computer Vision and Pattern Recognition, Springer, 2012 (book)
2011
ei
Lois, C., Kupferschläger, J., Bezrukov, I., Schmidt, H., Werner, M., Mannheim, J., Pichler, B., Schwenzer, N., Beyer, T.
Combined whole-body PET/MR imaging: MR contrast agents do not affect the quantitative accuracy of PET following attenuation correction
(SST15-05 ), 97th Scientific Assemble and Annual Meeting of the Radiological Society of North America (RSNA), December 2011 (talk)
ei
Sra, S., Nowozin, S., Wright, S.
Optimization for Machine Learning
pages: 494, Neural information processing series, MIT Press, Cambridge, MA, USA, December 2011 (book)
ei
Jegelka, S.
Cooperative Cuts: a new use of submodularity in image segmentation
Second I.S.T. Austria Symposium on Computer Vision and Machine Learning, October 2011 (talk)